





基于DSP TMS320LF2407的自動(dòng)避障小車(chē)設(shè)計(jì)
出處:電子設(shè)計(jì)工程 發(fā)布于:2011-06-08 15:42:48
移動(dòng)機(jī)器人是集環(huán)境感知、動(dòng)態(tài)決策與規(guī)劃、行為控制與執(zhí)行等多功能于一體的綜合系統(tǒng)?。近年來(lái),對(duì)移動(dòng)機(jī)器人的研究受到廣泛的重視,仿照生物的功能而發(fā)明的各種移動(dòng)機(jī)器人越來(lái)越多,小到娛樂(lè)機(jī)器人玩具、家用服務(wù)機(jī)器人,大到工程探險(xiǎn)、反恐防爆、軍事偵察機(jī)器人等,人們已經(jīng)清楚地體會(huì)到地面移動(dòng)機(jī)器人作為移動(dòng)機(jī)器平臺(tái)的優(yōu)越性。移動(dòng)機(jī)器人能夠移動(dòng)到固定式機(jī)器人無(wú)法到達(dá)的預(yù)定目標(biāo),完成設(shè)定的操作任務(wù)。相應(yīng)地,這些領(lǐng)域?qū)λ鶓?yīng)用的移動(dòng)機(jī)器人系統(tǒng)也提出了更高的要求,特別是在機(jī)器人的運(yùn)動(dòng)速度、靈活性、自主性、作業(yè)能力等方面的要求越來(lái)越高。避障與導(dǎo)航是移動(dòng)機(jī)器人研究的問(wèn)題之一。使移動(dòng)機(jī)器人無(wú)碰撞到達(dá)終點(diǎn),需解決兩方面的基本問(wèn)題。一是在運(yùn)動(dòng)過(guò)程中利用傳感器感知周?chē)粗h(huán)境;二是采用適當(dāng)?shù)乃惴ㄟM(jìn)行路徑規(guī)劃來(lái)實(shí)現(xiàn)機(jī)器人的實(shí)時(shí)避障。本設(shè)計(jì)是以TI公司生產(chǎn)的TMS320LF2407型DSP為,采集環(huán)境信息并控制智能小車(chē),3個(gè)紅外發(fā)收傳感器檢測(cè)智能小車(chē)前方的障礙物,并且根據(jù)障礙物位置進(jìn)行自動(dòng)避障。
1 自動(dòng)避障小車(chē)總體設(shè)計(jì)
該系統(tǒng)主要由DSP控制、電機(jī)驅(qū)動(dòng)、電源、測(cè)速以及視覺(jué)等模塊組成,其結(jié)構(gòu)如圖1所示。
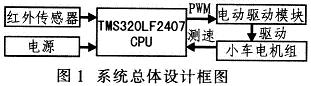
小車(chē)為3輪結(jié)構(gòu),前面2個(gè)輪分別由2個(gè)電機(jī)獨(dú)立驅(qū)動(dòng)控制,后面1個(gè)萬(wàn)向輪作為支撐輪。小車(chē)安裝有3個(gè)紅外傳感器,分別位于車(chē)頭的左、中、右部位,用于采集環(huán)境信息。車(chē)體規(guī)格為:車(chē)身板距地7.5 cm,車(chē)長(zhǎng)25 cm,車(chē)寬12 cm,車(chē)輪半徑5.5 cm。速度控制采用定頻調(diào)寬的PWM調(diào)速,并應(yīng)用速度反饋和閉環(huán)PID控制,從而實(shí)現(xiàn)小車(chē)的速度和位置控制。
2 自動(dòng)避障小車(chē)的硬件設(shè)計(jì)
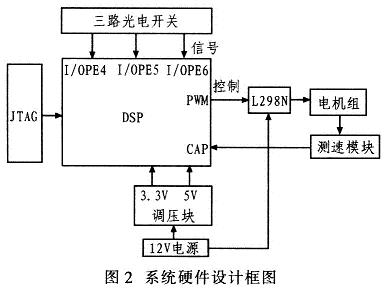
該系統(tǒng)以DSP TMS320LF2407A為,該DSP片內(nèi)資源豐富,12路脈寬調(diào)制(PWM)輸出。視覺(jué)模塊采用E3FDS3-0P1型紅外傳感器,有效探測(cè)距離為30 cm,探測(cè)角度30°。將3個(gè)紅外傳感器分別接至I/OPE接口的I/OPE4、I/OPE5和I/OPE6。12 V電源首先經(jīng)LM7805調(diào)壓到5 V,先將5 V電壓送入紅外傳感器,再送入MAX604降壓為3.3 V,如圖2所示。
采用L298驅(qū)動(dòng)電機(jī),0UTl,0UT2分別與小車(chē)的一個(gè)電機(jī)的正負(fù)極相連;OUT3,OUT4分別與小車(chē)的另一個(gè)電機(jī)的正負(fù)極相連;L298的INl和IN2引腳分別與DSP的IOPE0(方向4)、IOPE1(方向3)引腳連接,用于接收主控器件輸出的轉(zhuǎn)向電機(jī)的動(dòng)作指令,用于接收主控器件輸出的驅(qū)動(dòng)電機(jī)的動(dòng)作指令,而ENA和ENB引腳分別連接到DSP的IOPE0(PWM3)、IOPEl(PWM4)引腳,用于控制電機(jī)的速度。
其電路原理圖如圖3所示。
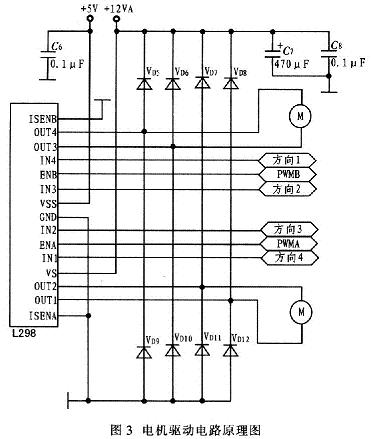
L298分別控制并調(diào)整前面2個(gè)電機(jī)的旋轉(zhuǎn)方向,控制小車(chē)的前進(jìn)、后退、向左、向右、停止。小車(chē)采用三輪結(jié)構(gòu),前面2個(gè)輪既是動(dòng)力輪又是方向輪,當(dāng)INl、IN2、ENA分別為l、0、1,同時(shí)IN3、IN4、ENB分別為0、l、l時(shí),小車(chē)前進(jìn);當(dāng)INl、IN2、ENA分別為1、O、l,同時(shí)IN3、IN4、ENB分別為l、0、l時(shí),小車(chē)右轉(zhuǎn);當(dāng)INl、IN2、ENA分別為0、1,1,與此同時(shí)IN3、IN4、ENB分別為1、0、1時(shí),小車(chē)左轉(zhuǎn)。
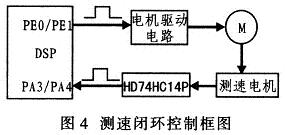
采用測(cè)速電機(jī)測(cè)量電機(jī)轉(zhuǎn)速,以此來(lái)判斷速度。電機(jī)轉(zhuǎn)速轉(zhuǎn)換為電脈沖信號(hào),其輸出經(jīng)過(guò)HD74HCl4P,送至DSP的PA3(CAPl)和PA4(CAP2)引腳,根據(jù)軟件設(shè)置使計(jì)數(shù)器對(duì)脈沖信號(hào)上升沿進(jìn)行遞增計(jì)數(shù)。如圖4所示。
3 自動(dòng)避障小車(chē)的軟件設(shè)計(jì)
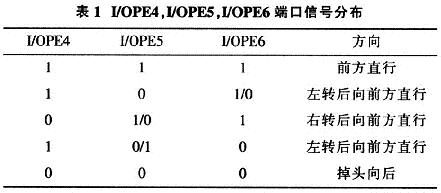
DSP每隔一段時(shí)間對(duì)I/OPE4,I/OPE5,I/OPE6這3個(gè)端口進(jìn)行查詢(xún),沒(méi)有障礙物時(shí)這3個(gè)端口為高電平。即111,左邊有障礙物時(shí)為011,右邊有障礙物時(shí)為110。前方有障礙物時(shí)則為010。小車(chē)根據(jù)紅外傳感器接收的信號(hào)判斷前方障礙物的分布并做出相應(yīng)的動(dòng)作,如表1所示。
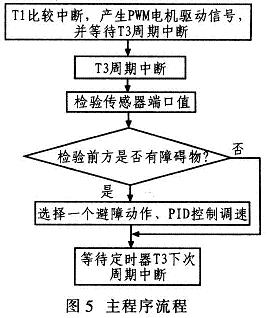
小車(chē)在普通情況下處于前進(jìn)狀態(tài),當(dāng)T3定時(shí)器發(fā)生周期中斷時(shí),進(jìn)入程序開(kāi)始檢測(cè)光電開(kāi)關(guān)的信號(hào)線端口,如果有障礙物則從避障程序中選擇一個(gè)執(zhí)行,如果沒(méi)有障礙物則小車(chē)?yán)^續(xù)前進(jìn)并且等待定時(shí)器的下中斷,其程序流程如圖5所示。
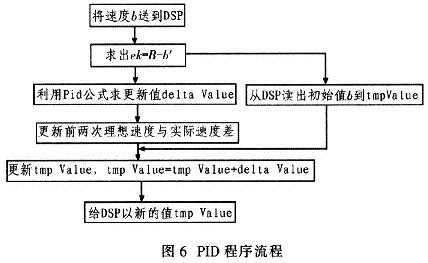
調(diào)節(jié)PID參數(shù)不僅可實(shí)現(xiàn)系統(tǒng)穩(wěn)定。先給小車(chē)右輪電機(jī)一個(gè)初始速度,讓小車(chē)以給定的初始速度運(yùn)轉(zhuǎn)起來(lái)。然后利用PID算法調(diào)速:在給定速度不變的情況下,每掃描程序。小車(chē)的實(shí)際反饋速度便與理想速度相比較,利用PID算法便可更新給定值。不斷更新給定值,直到實(shí)際速度與理想速度保持一致或者到下賦值則停止更新(ek=O)。程序流程如圖6所示,設(shè)右輪給定速度v對(duì)應(yīng)的理想速度為V,僅限右輪電機(jī),b’為給定速度b對(duì)應(yīng)的實(shí)際速度。
4 試驗(yàn)
安裝調(diào)試完成后,對(duì)小車(chē)性能進(jìn)行測(cè)試:
①小車(chē)的避障能力試驗(yàn)測(cè)試 錯(cuò)落擺放障礙物,讓小車(chē)向障礙物方向前進(jìn),當(dāng)距障礙物約25 cm時(shí),小車(chē)左轉(zhuǎn),然后再向前。發(fā)現(xiàn)小車(chē)的傳感器對(duì)亮色反映比較明顯,比如遇到白色障礙物,小車(chē)會(huì)在30 cm外就發(fā)現(xiàn)障礙物并產(chǎn)生動(dòng)作;當(dāng)小車(chē)遇到黑色障礙物時(shí),一般約在15 cm時(shí)才能感應(yīng)到障礙物。
②PID算法和PWM方法測(cè)試 分3次對(duì)小車(chē)進(jìn)行測(cè)試,每次要求避開(kāi)10個(gè)黑色障礙物。采用加入PID程序和PWM程序的小車(chē)進(jìn)行測(cè)試,小車(chē)3次分別避開(kāi)9、10、9個(gè)障礙物。試驗(yàn)表明加入PID算法和PWM方法的小車(chē)在調(diào)速方面明顯優(yōu)于不加入程序的,并在遇到障礙物時(shí)和避開(kāi)障礙物后都能夠快速調(diào)速,使小車(chē)避障能力大大提高。
5 結(jié)論
本文對(duì)避障小車(chē)的設(shè)計(jì)進(jìn)行分析后,提出了在DSPTMS320LF2407技術(shù)平臺(tái)上實(shí)現(xiàn)小車(chē)自動(dòng)檢測(cè)前方障礙物,并給出躲避動(dòng)作方法。由于紅外傳感器探測(cè)信息有限,不能夠判斷障礙物的距離、大小及形狀等。如果使用攝像頭作為視覺(jué)探測(cè)系統(tǒng),則可使避障小車(chē)性能更好,應(yīng)用范圍更廣泛。
參考文獻(xiàn):
[1]. TMS320LF2407 datasheet http://hbjingang.com/datasheet/TMS320LF2407_309787.html.
[2]. LM7805 datasheet http://hbjingang.com/datasheet/LM7805_843721.html.
[3]. MAX604 datasheet http://hbjingang.com/datasheet/MAX604_147290.html.
[4]. L298 datasheet http://hbjingang.com/datasheet/L298_442929.html.
版權(quán)與免責(zé)聲明
凡本網(wǎng)注明“出處:維庫(kù)電子市場(chǎng)網(wǎng)”的所有作品,版權(quán)均屬于維庫(kù)電子市場(chǎng)網(wǎng),轉(zhuǎn)載請(qǐng)必須注明維庫(kù)電子市場(chǎng)網(wǎng),http://hbjingang.com,違反者本網(wǎng)將追究相關(guān)法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點(diǎn)或證實(shí)其內(nèi)容的真實(shí)性,不承擔(dān)此類(lèi)作品侵權(quán)行為的直接責(zé)任及連帶責(zé)任。其他媒體、網(wǎng)站或個(gè)人從本網(wǎng)轉(zhuǎn)載時(shí),必須保留本網(wǎng)注明的作品出處,并自負(fù)版權(quán)等法律責(zé)任。
如涉及作品內(nèi)容、版權(quán)等問(wèn)題,請(qǐng)?jiān)谧髌钒l(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。
- 掌握 DSP:原理剖析與應(yīng)用實(shí)踐2025/5/8 14:03:24
- 模糊邏輯在 DSP 上實(shí)時(shí)執(zhí)行2023/7/25 17:13:30
- 多速率DSP及其在數(shù)模轉(zhuǎn)換中的應(yīng)用2023/6/12 15:28:52
- 使用 DSP 加速 CORDIC 算法2023/3/29 15:46:30
- 高速DSP系統(tǒng)的信號(hào)完整性2022/9/26 16:45:38

- 編碼器的工作原理及作用1
- 超強(qiáng)整理!PCB設(shè)計(jì)之電流與線寬的關(guān)系2
- 三星(SAMSUNG)貼片電容規(guī)格對(duì)照表3
- 電腦藍(lán)屏代碼大全4
- 國(guó)標(biāo)委發(fā)布《電動(dòng)汽車(chē)安全要求第3部分:人員觸電防護(hù)》第1號(hào)修改單5
- 通俗易懂談上拉電阻與下拉電阻6
- 繼電器的工作原理以及驅(qū)動(dòng)電路7
- 電容單位8
- 跟我學(xué)51單片機(jī)(三):?jiǎn)纹瑱C(jī)串口通信實(shí)例9
- 一種三極管開(kāi)關(guān)電路設(shè)計(jì)10
- 高速PCB阻抗控制核心實(shí)操規(guī)范
- 高速數(shù)字系統(tǒng)(如DDR、SerDes)中的信號(hào)完整性濾波
- MOSFET在UPS電源中的應(yīng)用解析
- 電源管理IC在物聯(lián)網(wǎng)設(shè)備中的應(yīng)用
- SMT連接器焊接缺陷分析
- MOSFET在汽車(chē)電子中的應(yīng)用要求
- 通信設(shè)備電源管理IC應(yīng)用解析
- 通信設(shè)備連接器選型與設(shè)計(jì)
- PCB電磁兼容性(EMC)設(shè)計(jì)核心實(shí)操規(guī)范
- 物聯(lián)網(wǎng)節(jié)點(diǎn)低功耗設(shè)計(jì):信號(hào)鏈中的濾波與功耗管理


