





基于雷達航跡融合算法驗證系統(tǒng)的設(shè)計
出處:楊俊強 毛征 張志 遠菲 北京工業(yè)大學(xué) 發(fā)布于:2011-09-02 09:54:05
0 引言
在防空指揮自動化信息處理過程中,由多雷達站點所提供目標信息源,在信息融合中,其航跡融合是關(guān)鍵的一個環(huán)節(jié)。航跡關(guān)聯(lián)的正確與否,直接關(guān)系到其他融合(如數(shù)據(jù)融合、特征融合、決策融合等)的正確性。在航跡關(guān)聯(lián)過程中,需要考慮各種各樣情況,如目標屬性、目標特征、威脅度、批號,各雷達站點的情況等,根據(jù)相應(yīng)條件設(shè)計關(guān)聯(lián)與融合算法。如何根據(jù)實際任務(wù)背景設(shè)計仿真各種情況,來有效地驗證目標航跡關(guān)聯(lián)與融合算法的正確性是有效解決算法驗證的關(guān)鍵所在。
隨著科學(xué)技術(shù)的不斷發(fā)展,多傳感器信息融合已經(jīng)迅速發(fā)展起來,并在現(xiàn)代C4ISR(指揮、控制、通信、計算機、情報、監(jiān)視、偵查)系統(tǒng)中和各種武器平臺上以及許多民事領(lǐng)域得到了廣泛的應(yīng)用。所謂多傳感器信息融合就是利用計算機技術(shù)對按時序獲得的若干傳感器的觀測信息在一定準則下加以自動分析、優(yōu)化綜合以完成所需的決策和估計任務(wù)而進行的信息處理過程。信息融合的目標是基于各傳感器分離觀測信息,通過對信息的優(yōu)化組合導(dǎo)出更多的有效信息。這是協(xié)同作用的結(jié)果,它的終目的是利用多個傳感器共同或聯(lián)合操作的優(yōu)勢,來提高整個傳感器系統(tǒng)的有效性。 航跡融合是多傳感器信息融合技術(shù)在軍事上的一個重要應(yīng)用。所謂航跡融合,就是對多個傳感器所掃描到的各目標的狀態(tài)信息(位置信息)進行融合。在目標密集的軍事作戰(zhàn)系統(tǒng)中,與單傳感器相比,通過多個傳感器對目標進行跟蹤,再將各傳感器的目標航跡經(jīng)過融合而得到的目標位置信息更有可靠性,對整個軍事作戰(zhàn)系統(tǒng)也更有利用價值。
1 驗證系統(tǒng)構(gòu)架與工作原理
航跡融合驗證系統(tǒng)構(gòu)架主要由航跡融合中心(FCSC)、站點(RSC)、網(wǎng)絡(luò)等組成,如圖1所示。整個系統(tǒng)通過自構(gòu)建方式將FCSC與每個RSC構(gòu)成一完整信息交換系統(tǒng)。圖中每個站點為仿真一部雷達的信息輸出裝置,且每個站點可提供多批不同地理位置、不同掃描時間的目標信息。站點的規(guī)模可根據(jù)實際情況來設(shè)置。航跡融合中心將來自各站點目標信息進行關(guān)聯(lián)與融合,并給出終的綜合目標航跡。圖中待驗證的“航跡關(guān)聯(lián)與融合模塊”(TAFM)通過程序“接口模塊”嵌入到FCSC里。
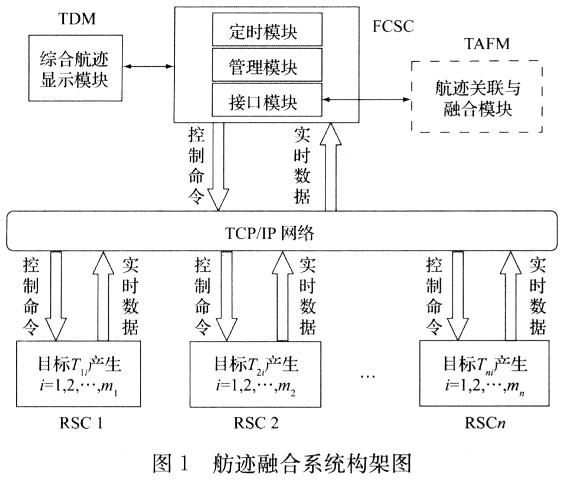
在程序啟動后,融合中心計算機(FCSC)首先向網(wǎng)絡(luò)廣播確認信息與本身的系統(tǒng)時間信息。同時給出仿真開始命令,各RSC開始仿真計算,并通過集線器、TCP/IP協(xié)議網(wǎng)絡(luò)將目標批號、坐標值、屬性、時間等數(shù)據(jù)送至融合中心。
圖1中,接口模塊是將按照要求所設(shè)計的航跡融合模塊中數(shù)據(jù)格式轉(zhuǎn)換到融合中心驗證系統(tǒng)所能接受的數(shù)據(jù)格式。
2 驗證系統(tǒng)軟件設(shè)計
2.1 站點坐標系
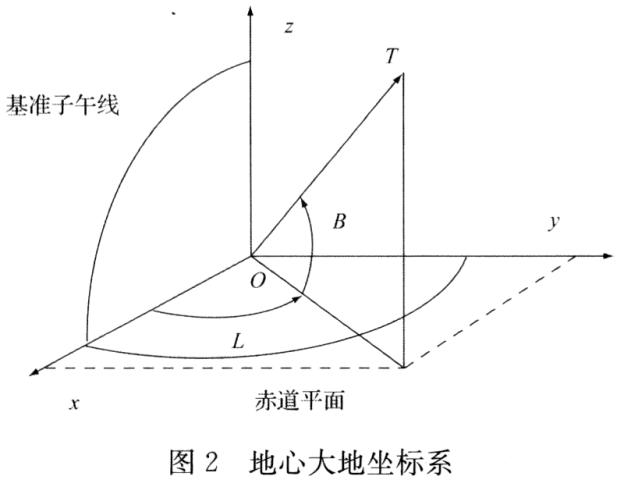
在該驗證系統(tǒng)中,站點坐標系采用地心直角坐標系,如圖2所示。圖中T為站點,O為地心,B、L分別為緯度與經(jīng)度。采用該坐標系是為各站點之間進行空間校正之用。所有站點的目標坐標值數(shù)據(jù)均通過地心大地坐標系進行轉(zhuǎn)換。每個站點的大地坐標值為:(Bi,Li,Hi)i=O,1,2,…,n。當i=O時,為基準站點大地坐標。
站點測量坐標系如圖3所示,O點為站點測量中心,O-XYZ為東北天坐標系,OX-指向大地東方,OY-指向大地北方。
現(xiàn)假定雷達基準方向與Y同向。當然雷達基準可以任意,將測得的目標方位角度轉(zhuǎn)換到O-XYZ坐標上即可。測量站點的球坐標→直角坐標的轉(zhuǎn)換為:
2.2 站點目標模型產(chǎn)生與輸出定時
2.2.1 目標模型產(chǎn)生
在空中目標模型采用直角坐標進行建立:
式中: 為第j個目標的初始值。
對同一目標,不同站點所處地理位置不同,因而所得到的目標坐標值也不同。為仿真不同地理位置下的目標航跡,需將式(2)的目標轉(zhuǎn)換到每個站點下的直角坐標:
式中:地球的卯酉圈半徑N與橢球偏心率е。(xGj,yGj,zGj)為目標的大地直角坐標值。因此,第i站點第j個目標在各自站點測量直角坐標系下的目標坐標值為:
式中:(為的轉(zhuǎn)置;(Xi,Yi,Zi)為各站點的大地直角坐標值,由式(4)得到。
同時針對每個目標還有批號Nij、目標屬性Sij(我機、友機、敵機)。不同站點即使針對同一目標,其批號也未必相同,但屬性是的。
2.2.2 目標輸出定時
每個站點計算機在啟動時受融合中心的定時器控制。但不考慮網(wǎng)絡(luò)的時延。站點輸出目標坐標值時,同時取該站點的系統(tǒng)時間,與坐標值一起打包送至融合中心。每個站點的數(shù)據(jù)率根據(jù)實際雷達或情報網(wǎng)的情況可設(shè)置為:1次/秒、1次/2秒或1次/3秒。
2.3 融合中心模型
2.3.1 空間校準模塊
各站點目標值轉(zhuǎn)換到大地直角坐標(xGij,yGij,zGij)后,再將其轉(zhuǎn)換到融合中心(X0,y0,Z0)所在的大地直角坐標系(xGij,yGij,zGij)里。由式(5)將其轉(zhuǎn)換到融合中心的測量坐標系(xij,yij,zij)里。這就完成了各站點目標的坐標轉(zhuǎn)換:
上述轉(zhuǎn)換模式比較,考慮到了地球的曲率。如果各站點之間距離不大,也可直接進行站點間坐標的直接轉(zhuǎn)換。但由于上級情報指揮系統(tǒng)可能距雷達站點較遠,因此,需要考慮大地曲面問題。
2.3.2 時間校準模塊
由于每個站點各自定時,沒有一個統(tǒng)一的定時關(guān)系,且數(shù)據(jù)傳輸也需要時間。所以在進行多站點、多目標航跡關(guān)聯(lián)時,除進行空間校正外,還要進行時間校正,使得各站點的輸出數(shù)據(jù)統(tǒng)一到一個基準時間上,如采用B碼授時裝置。這就要求每個站點的輸出數(shù)據(jù)必須帶有時間戳,以便于明確該輸出數(shù)據(jù)的獲取時刻。由于一般搜索雷達的掃描周期為T=1 s,所以,以1 s為航跡關(guān)聯(lián)周期。各站點數(shù)據(jù)通過外推歸到統(tǒng)一時刻上tk上,如圖4所示。取兩個標準授時之間為1 s,且tk-tk-1=T,tij(i=1,2,…,n;j=l,2,…,m)分別為第i站點第j個數(shù)據(jù)輸出時刻。所以外推時間△tij為:
然后進行坐標外推:
因此,所有航跡關(guān)聯(lián)均在(xPij,yPij,zPij)基礎(chǔ)上完成。
對于周期為2 s的站點數(shù)據(jù),還需要進行數(shù)據(jù)加密處理,使之成為1次/秒的數(shù)據(jù)率,以便于和T=l s站點的點跡進行關(guān)聯(lián),即兩秒之間的時刻坐標插值為:
式中:T=1 s。
2.3.3 綜合航跡顯示模塊
目標空中態(tài)勢綜合航跡通過綜合航跡顯示模塊仿真完成,如圖5所示。由待驗證的航跡關(guān)聯(lián)融合將融合后的目標綜合航跡參數(shù)送至綜合航跡顯示模塊,以顯示空中目標的態(tài)勢,驗證航跡關(guān)聯(lián)融合的正確性。圖中給出了6條綜合航跡的顯示,并給每條航跡賦予了批號。圖5中,中心為融合中心,每個環(huán)代表一定的距離,在外環(huán)有角度的分劃線。正北為基準角度。
當目標超出距離環(huán)時,即目標已飛出探測器的威力范圍,不在顯示其航跡。
3 系統(tǒng)仿真與分析
分布式仿真是工程領(lǐng)域內(nèi)一種應(yīng)用較為廣泛的仿真技術(shù),是采用協(xié)調(diào)一致的結(jié)構(gòu)、標準、協(xié)議和數(shù)據(jù)庫,通過局域網(wǎng)、廣域網(wǎng)將分布在各地的仿真設(shè)備互聯(lián)并交互作用的一種綜合環(huán)境。本文將想定系統(tǒng)應(yīng)用于分布式仿真系統(tǒng)中,可以驗證各武器系統(tǒng)的戰(zhàn)術(shù)技術(shù)指標,評估各武器系統(tǒng)和整個大系統(tǒng)的作戰(zhàn)效能以及各武器系統(tǒng)在整個仿真體系中的地位和作用,既有利于提高仿真系統(tǒng)的可重用性、互操作性,也增強了仿真的可靠性與置信度。
系統(tǒng)仿真伊始,F(xiàn)CSC與各RSC通過系統(tǒng)自構(gòu)建模式自動建立信息關(guān)系,同時各RSC的地理信息(Bi,Li,Hi,i=0,l,2,…,n)也將送至FCSC。
由各RSC里目標航跡模塊所產(chǎn)生的目標信息通過TCP/IP以太網(wǎng)向FCSC傳送,根據(jù)輸入的各站點的目標,經(jīng)由時空校正后,由待驗證航跡關(guān)聯(lián)融合模塊處理,然后送至綜合顯示模塊。
在仿真過程中,選擇了3個站點,6批目標進行了仿真驗證實驗,如表l所示。站點RSCl可輸出6批目標,RSC2與RSC3可分別輸出6批目標中的3批。6批目標在X-Y平面上的運動關(guān)系如圖6所示。其中1~4批號目標平行飛行。
待驗證航跡融合模塊就是將3個站點輸出的目標航跡進行綜合處理,即航跡歸類,得到綜合航跡,如圖5所示,可一目了然航跡融合的正確與否。
4 結(jié)束語
該分布式雷達站點航跡融合驗證系統(tǒng),可用于航跡關(guān)聯(lián)算法驗證、航跡融合仿真等。具有簡單適用、效果直觀等特點。
將來可擴展到雷達的二次信息處理過程仿真與驗證、防空反導(dǎo)武器系統(tǒng)指揮與控制仿真等方面。
版權(quán)與免責(zé)聲明
凡本網(wǎng)注明“出處:維庫電子市場網(wǎng)”的所有作品,版權(quán)均屬于維庫電子市場網(wǎng),轉(zhuǎn)載請必須注明維庫電子市場網(wǎng),http://hbjingang.com,違反者本網(wǎng)將追究相關(guān)法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點或證實其內(nèi)容的真實性,不承擔此類作品侵權(quán)行為的直接責(zé)任及連帶責(zé)任。其他媒體、網(wǎng)站或個人從本網(wǎng)轉(zhuǎn)載時,必須保留本網(wǎng)注明的作品出處,并自負版權(quán)等法律責(zé)任。
如涉及作品內(nèi)容、版權(quán)等問題,請在作品發(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。
- ARM技術(shù)架構(gòu)與應(yīng)用開發(fā)實踐指南2026/1/6 10:40:19
- 嵌入式實時操作系統(tǒng)(RTOS)選型與移植技術(shù)指南2025/12/31 10:42:31
- 工業(yè)嵌入式系統(tǒng):通信接口技術(shù)選型與抗干擾設(shè)計實踐2025/12/15 14:36:53
- 深入解析嵌入式 OPENAMP 框架:開啟異核通信新時代2025/7/22 16:27:29
- 一文快速了解OPENWRT基礎(chǔ)知識2025/7/14 16:59:04



