





基于RT-Linux機器人控制系統(tǒng)實時性的探討
出處:計算機工程 發(fā)布于:2011-09-05 11:46:49
在機器人控制器的設(shè)計中,如何的提高機器人控制的實時性是一個關(guān)鍵問題。這里我們運用了將軟件任務(wù)劃分實時域與非實時域的思想,實現(xiàn)了一種將RT-Linux與Linux結(jié)合的實時機器人控制系統(tǒng)。該系統(tǒng)的優(yōu)點是:提供了非常高效的滿足底層硬件設(shè)備的實時性能,可以充分利用 Linux的強大功能;而且RT-Linux是完全開放源代碼的軟件,降低了開發(fā)成本。
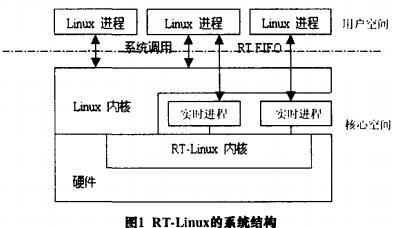
1 RT-Linux的系統(tǒng)結(jié)構(gòu)
RT-Linux的基本思想就是使Linux運行在實時之下,如圖1所示。RT—Linux是一個可加載的模塊。一個小的RT-Linux實時內(nèi)核同原來的Linux內(nèi)核共同控制處理器。實時內(nèi)核直接管理硬件中斷,因此實時內(nèi)核操縱著機器的響應(yīng)時間,原來的Linux就無法影響實時任務(wù)了。在RT- Linux中設(shè)計了兩類中斷。軟中斷是正常的Linux中斷,硬中斷則是真正的實時中斷,執(zhí)行時幾乎沒有任何延遲。實現(xiàn)時,RT-Linux是通過在 Linux和中斷處理器之間設(shè)計一個仿真軟件來達到其目的的。
在RT-Linux中采用兩種調(diào)度策略。一種是基于優(yōu)先級的搶占式調(diào)度算法;另一種是lsmaelRipoll實現(xiàn)的 EDF(EarliestDeadlineFirst)算法。對于周期性任務(wù)可以采用單調(diào)率調(diào)度算法,即周期短的任務(wù)能夠獲得較高的優(yōu)先級。調(diào)度策略將 Linux視為賦予優(yōu)先級的實時任務(wù)。
Linux僅僅在實時系統(tǒng)沒有其它任務(wù)時運行。Linux和實時任務(wù)之間的轉(zhuǎn)換依據(jù)上述提及的軟中斷狀態(tài)而定。RT-Linux通過這樣一種設(shè)計方法,將標(biāo)準(zhǔn)的Linux改成一個可搶占的、具有低延遲中斷處理的實時系統(tǒng)。
2 實時機器人控制系統(tǒng)的軟/硬件結(jié)構(gòu)
2.1硬件系統(tǒng)結(jié)構(gòu)
整個實時機器人控制系統(tǒng)主要的硬件部件為:與IBM—PC兼容PentiumIII733MHzq-業(yè)控制微機(IPC),內(nèi)存l28MB;三軸位置控制卡(PCL一832);l0/100M自適應(yīng)網(wǎng)卡、集線器等以太網(wǎng)連接設(shè)備;機器人本體為具有5個自由度的日產(chǎn)PT500機器人。
機器人控制器運行于一臺工業(yè)控制微型計算機(IPC)上。在該IPC上安裝了兩塊三軸位置控制卡。每塊三軸位置控制卡能對三軸進行聯(lián)動插補控制。每軸有專用位置芯片控制,構(gòu)成一個伺服位置和速度環(huán)。放在DDA脈沖緩沖器中的脈沖數(shù)被傳到DDA發(fā)生器,在下一個DDA周期中輸出。然后由三軸位置控制卡將各軸對應(yīng)的脈沖數(shù)解釋為相應(yīng)的電平信號,驅(qū)動伺服驅(qū)動器以驅(qū)動機器人本體的運動。
2.2軟件系統(tǒng)結(jié)構(gòu)
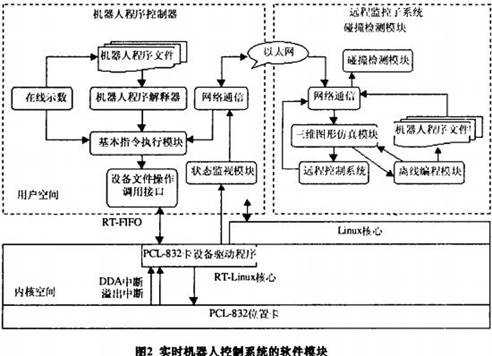
整個機器人實時控制器的系統(tǒng)結(jié)構(gòu)如圖2所示,整個系統(tǒng)分為2個域:實時域和非實時域。實時域中實現(xiàn)的是實時設(shè)備驅(qū)動程序,負(fù)責(zé)PCL-832位置控制卡的控制與中斷響應(yīng),驅(qū)動機器人本體運動;非實時域中實現(xiàn)的是上層的機器人控制界面和遠程監(jiān)控子系統(tǒng);二者之問通過實時先進先出(RT-FIFO)緩沖隊列進行數(shù)據(jù)交換。內(nèi)核調(diào)度策略將Linux視為賦予優(yōu)先級的實時任務(wù),Linux中的非實時任務(wù)僅僅在實時系統(tǒng)沒有其它任務(wù)時運行,以確保實時任務(wù)的實時優(yōu)先級。
(1)RT-Linux中的實時模塊
實時域中的軟件模塊主要是三軸位置控制卡(PCL一832)的設(shè)備驅(qū)動程序。驅(qū)動程序是能夠直接訪問硬件的模塊,具有應(yīng)用程序不具備的處理中斷和讀寫端口的能力,是嵌入操作系統(tǒng)的底層軟件。三軸位置控制卡以毫秒級發(fā)出DDA中斷請求,對DDA中斷的響應(yīng)的快慢是決定整個機器人控制器實時性能的關(guān)鍵指標(biāo)。RT-Linux中的三軸位置控制卡的實時設(shè)備驅(qū)動程序必須處理以下事務(wù):
① 響應(yīng)三軸位置卡的插補周期中斷(DDA),并輸出位置脈沖數(shù)值;
② 響應(yīng)三軸位置卡的誤差溢出中斷(Ov),通知應(yīng)用程序進行相應(yīng)處理;
③ 為應(yīng)用程序提供服務(wù),如讀寫I/O端口、設(shè)置參數(shù)、讀取狀態(tài)等。
(2)Linux中的非實時模塊
非實時域中的軟件模塊由機器人控制器和遠程監(jiān)控子系統(tǒng)組成。本地的機器人控制器負(fù)責(zé)將文本機器人指令解釋成相應(yīng)的位置脈沖數(shù)據(jù),通過先進先出(RT- FIFO)緩沖隊列發(fā)送給實時域中的驅(qū)動程序驅(qū)動機器人本體運動。同時具有權(quán)限的用戶能夠以離線編程方式或在線操作方式通過高速以太網(wǎng)分別與離線編程與仿真數(shù)據(jù)發(fā)生器和機器人控制器進行連接,實現(xiàn)離線編程和對機器人的實際控制。
3 實時系統(tǒng)的性能評估
實時系統(tǒng)的性能評估主要在8個方面進行。它們分別是任務(wù)換道性能、任務(wù)優(yōu)先級性能、內(nèi)存分配性能、任務(wù)內(nèi)部通信性能、中斷延遲時間、操作系統(tǒng)運行時效率、初始化時間和關(guān)機時間。而在機器人控制中講究的就是中斷響應(yīng)時問。因為就本項目而言,我們關(guān)I~,RT-Linux系統(tǒng)對三軸位置控制卡(PCL一 832)的DDA中斷的響應(yīng)時間,所有工作的目的就是為了盡量減少中斷響應(yīng)時間。
3.1測試環(huán)境及方法
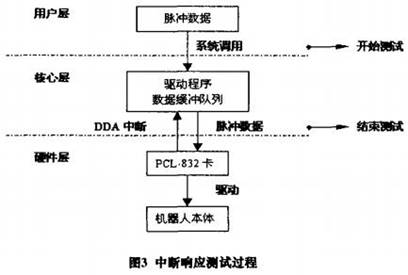
用于測試的工業(yè)控制微機的硬件配置為IntelPentium(clockl20MHz),RAM64MB;服務(wù)器軟件是用 RedHatLinux6.0(內(nèi)核版本號2.2.5一l5),RT-Linux的版本號2.2;網(wǎng)絡(luò)環(huán)境l0/100M自適應(yīng)網(wǎng)卡。中斷響應(yīng)時間的快慢直接反映了這樣一個過程的快慢:在用戶層的用戶進程通過系統(tǒng)調(diào)用將脈沖數(shù)據(jù)寫入位于層的實時驅(qū)動程序的數(shù)據(jù)緩沖隊列,在下一個DDA中斷請求到來時,中斷服務(wù)例程將數(shù)據(jù)緩沖隊列中的脈沖數(shù)據(jù)寫入三軸位置控制卡的動作控制芯片的緩沖區(qū),驅(qū)動機器人本體運行。圖3反映了上述過程。
3.2測試結(jié)果
分別設(shè)置DDA周期為8、12、16、24ms的4種情況作了測試,經(jīng)過計算,可以得出表1所示的結(jié)果。
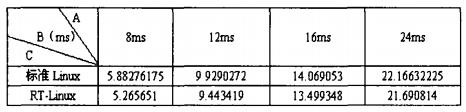
表1 低負(fù)載下D DA中斷響應(yīng)處理時問測試結(jié)果
由此得出,在低負(fù)載下RT-Linux的測量時間要比Linux下快0.5—0.6ms左右,證明采用RT—Linux系統(tǒng)確實能夠提高系統(tǒng)的實時性能。需要注意的是:
① RT—Linux直接接受硬件中斷,所以我們將PCL一832卡的DDA中斷和OV中斷安裝在實時域中,目的就是讓RT-Linux捕獲這兩個實時中斷,進行處理。
② 如果用戶應(yīng)用層開辟大量的用戶進程,則對于分時的標(biāo)準(zhǔn)Linux來說會受到很大程度的影響。
由測試結(jié)果可看出,RT-Linux系統(tǒng)中斷響應(yīng)比標(biāo)準(zhǔn)Linux延時時間短,這個結(jié)果也預(yù)示在系統(tǒng)高負(fù)載情況下RT-Linux系統(tǒng)中的實時性能的優(yōu)勢將更為明顯。實際使用該實時機器人控制器時,機器人運行非常穩(wěn)定,能夠滿足實時控制的需要。
參考文獻:
[1]. 100M datasheet http://hbjingang.com/datasheet/100M_2509927.html.
[2]. PT500 datasheet http://hbjingang.com/datasheet/PT500_557175.html.
版權(quán)與免責(zé)聲明
凡本網(wǎng)注明“出處:維庫電子市場網(wǎng)”的所有作品,版權(quán)均屬于維庫電子市場網(wǎng),轉(zhuǎn)載請必須注明維庫電子市場網(wǎng),http://hbjingang.com,違反者本網(wǎng)將追究相關(guān)法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點或證實其內(nèi)容的真實性,不承擔(dān)此類作品侵權(quán)行為的直接責(zé)任及連帶責(zé)任。其他媒體、網(wǎng)站或個人從本網(wǎng)轉(zhuǎn)載時,必須保留本網(wǎng)注明的作品出處,并自負(fù)版權(quán)等法律責(zé)任。
如涉及作品內(nèi)容、版權(quán)等問題,請在作品發(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。
- ARM技術(shù)架構(gòu)與應(yīng)用開發(fā)實踐指南2026/1/6 10:40:19
- 嵌入式實時操作系統(tǒng)(RTOS)選型與移植技術(shù)指南2025/12/31 10:42:31
- 工業(yè)嵌入式系統(tǒng):通信接口技術(shù)選型與抗干擾設(shè)計實踐2025/12/15 14:36:53
- 深入解析嵌入式 OPENAMP 框架:開啟異核通信新時代2025/7/22 16:27:29
- 一文快速了解OPENWRT基礎(chǔ)知識2025/7/14 16:59:04



