





一種“動靜結(jié)合”的CAN總線調(diào)度算法在汽車電子控制
出處:維庫電子市場網(wǎng) 發(fā)布于:2016-09-22 18:15:23
CAN總線初是由德國BOSCH公司于20世紀80年代初提出的,當時主要應用于汽車電氣通信,它將汽車上各種信號的接線只用兩根簡潔的電纜線取代,而各種電子裝置通過CAN控制器掛到這兩根電纜上,設(shè)備之間進行數(shù)據(jù)通信和數(shù)據(jù)共享,從而大大減少了汽車上的線束。CAN總線結(jié)構(gòu)獨特,性能可靠,目前被公認為是有前途的現(xiàn)場控制總線之一。
1、基于CAN總線的汽車電子控制網(wǎng)絡中潛在問題
從信息共享角度分析,現(xiàn)代典型的汽車電子控制單元有:電控燃油噴射系統(tǒng)、電控傳動系統(tǒng)、防抱死制動系統(tǒng)(ABS)、防滑控制系統(tǒng)(ASR)、巡航系統(tǒng)、空調(diào)控制系統(tǒng)等,用CAN總線將各個單元節(jié)點連接起來,組成實時通信網(wǎng)絡。
汽車CAN總線網(wǎng)絡在實際運行過程中,眾多節(jié)點之間需要進行大量的實時數(shù)據(jù)交換,不可避免會出現(xiàn)總線負荷過大的情況。當信息幀的碰撞概率達到一定程度時,系統(tǒng)中一部分信息幀的收發(fā)就會產(chǎn)生延時,甚至根本不能收發(fā)成功。這樣,當駕駛員剎車時,即使時延只有幾個毫秒,但時速100公里的汽車也可能在這期間內(nèi)全速駛出3~4米,后果將不堪設(shè)想。
為了解決上述問題,本文提出了一種結(jié)合TTCAN(Time Triggered Controller Area Network)技術(shù)和動態(tài)晉升機制[4]各自所長的“動靜結(jié)合”的調(diào)度算法。該算法有效解決了數(shù)據(jù)的發(fā)送時延和沖突問題,改善了CAN總線數(shù)據(jù)傳輸?shù)膶崟r性。
2、基于TTCAN技術(shù)的時間觸發(fā)調(diào)度方式
TTCAN由時間進程驅(qū)動,其時間觸發(fā)調(diào)度由順序固定的時間窗組成。時間窗是用于交換報文的時間片斷,通常有三類時間窗:專用時間窗(特定的周期性報文)、仲裁時間窗(通過仲裁訪問總線的報文)和空閑時間窗(為總線擴展所保留),如圖1所示。專用時間窗類似于TDMA(時分多路訪問),屬于離線進行的靜態(tài)調(diào)度,所有流程和時間參數(shù)均需要預先指定,并可以在多級或多個TTCAN網(wǎng)絡內(nèi)實現(xiàn)同步。TTCAN的全局時間由時間主機周期發(fā)送的參考報文產(chǎn)生,它的總線多可以配置8個具有優(yōu)先級的時間主機節(jié)點,以確保總線的連續(xù)、確定性通信,優(yōu)先級的時間主機為當前時間主機。

圖1 TTCAN的基本周期和時間窗
在節(jié)點編程時,可以利用處理器的定時器中斷周期作為NTU(Network Time Unit),其值定義為在CAN總線上以1Mbps的速率傳輸1幀8字節(jié)數(shù)據(jù)幀所需時間的八分之一,約為16.75μs。對周期中斷次數(shù)進行計數(shù),總線的調(diào)度從主節(jié)點發(fā)送參考報文開始,當計數(shù)器值與節(jié)點設(shè)定值相符時,則發(fā)送周期報文。傳輸數(shù)據(jù)幀時的時間窗利用率可以定義為:時間窗利用率=(傳輸數(shù)據(jù)幀所需的NTU數(shù)/時間窗長度)×100%。在實際測試中可以發(fā)現(xiàn),當時間窗小、調(diào)度周期數(shù)大時,誤碼率較大;當時間窗增大即時間窗利用率較低時,誤碼率基本維持在很低的水平。
3、基于動態(tài)優(yōu)先級調(diào)度算法的事件觸發(fā)調(diào)度方式
仲裁窗發(fā)送事件觸發(fā)報文,如果采用傳統(tǒng)的靜態(tài)優(yōu)先級分配機制,將會在網(wǎng)絡負擔繁重的情況下出現(xiàn)發(fā)送傳輸時延或者丟失報文。而動態(tài)優(yōu)先級調(diào)度算法則能很好地解決這一問題。以下是該算法的基本原理。
首先,將CAN的仲裁域(以擴展幀格式為例)分成優(yōu)先級和標識兩部分,如圖2所示。標識部分是固定用來標識協(xié)議幀的,這也是協(xié)議幀的惟一標識,與傳統(tǒng)協(xié)議幀標識符的意義完全相同;優(yōu)先級部分已經(jīng)不再具有協(xié)議幀的標識功能,而只是表示協(xié)議幀的優(yōu)先級功能,所以它可以根據(jù)總線調(diào)度機制分配給協(xié)議幀的優(yōu)先級的變化而變化。
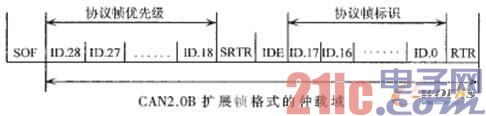
圖2 CAN擴展幀格式的仲裁域的劃分
其次,當協(xié)議幀次發(fā)送、且當它在發(fā)送時和其他協(xié)議幀碰撞并失去仲裁時,即退出發(fā)送,并置優(yōu)先級上升一位后,再重新發(fā)送。因為這時其優(yōu)先級高于其他協(xié)議幀,在整個網(wǎng)絡中如果沒有其他與之具有相同優(yōu)先級的協(xié)議幀同時發(fā)送,即使和其他的協(xié)議幀(處于次發(fā)送的)碰撞,也會贏得仲裁,所以發(fā)送成功的概率很大。
實現(xiàn)動態(tài)優(yōu)先級晉升的算法很簡單,其軟件流程圖如圖3所示。
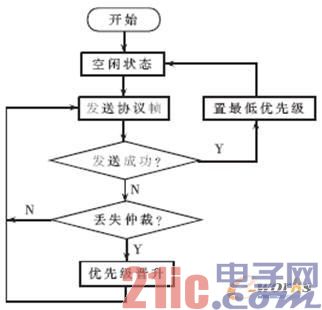
圖3 動態(tài)優(yōu)先級調(diào)度算法的程序流程圖
4、調(diào)度算法在汽車電子控制網(wǎng)絡中的應用
作者設(shè)計了防抱死系統(tǒng)(ABS)、電子助力轉(zhuǎn)向系統(tǒng)(EPS)以及車身控制系統(tǒng)(兼做低速CAN總線與高速CAN總線之間的網(wǎng)橋)作為CAN總線汽車電子控制網(wǎng)絡節(jié)點,上位PC機節(jié)點采用IXXAT公司的CANlink模塊(CAN-RS232轉(zhuǎn)換器)與總線相連,并使用該公司的CAN BUS Tester(CAN總線測試儀)模塊以及CanAnalyser(CAN總線分析開發(fā))軟件進行了CAN網(wǎng)絡的設(shè)計和開發(fā)。采用本文介紹的調(diào)度算法,應用層部分采用的是目前流行的J1939協(xié)議。
4.1 汽車電子控制網(wǎng)絡硬件設(shè)計
防死抱系統(tǒng)、電子助力轉(zhuǎn)向系統(tǒng)及車身控制系統(tǒng)的處理器均選用了飛思卡爾公司的MC9S12DP256芯片,該芯片是一款低成本、高性能的16位HCS12系列微處理器,內(nèi)置有msCAN控制器,非常適合作為汽車電子控制單元的部件; CAN總線收發(fā)器選用的是MC33989(高速總線)芯片和MC33388芯片(低速總線);車身控制系統(tǒng)中的LIN總線收發(fā)器和電機驅(qū)動選用的都是MC33399芯片;車燈及其他負載的驅(qū)動選用的是MC33888芯片。網(wǎng)絡整體框圖如圖4所示。
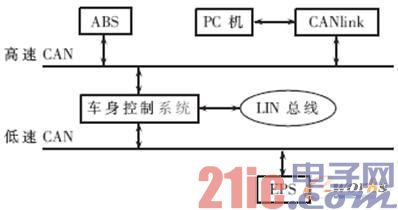
圖4 汽車電子控制網(wǎng)絡的整體框圖
4.2 汽車電子控制網(wǎng)絡軟件設(shè)計
利用CodeWarrior集成開發(fā)環(huán)境IDE(Integrated Development Environment),通過背景調(diào)試方式BDM(Background Debug Mode),控制程序和修改相關(guān)參數(shù),在不干擾目標程序運行的情況下,實時監(jiān)測各寄存器和存儲器,實現(xiàn)了控制程序的板上在線調(diào)試,從而提高了集成系統(tǒng)的開發(fā)效率和試驗的方便性,縮短了試驗周期。
系統(tǒng)所需軟件模塊主要由系統(tǒng)初始化模塊、啟動自檢模塊、主控制模塊、數(shù)據(jù)采集模塊、數(shù)據(jù)處理模塊、參考車速計算模塊、控制決策和執(zhí)行機構(gòu)動作模塊、故障診斷模塊、總線通信模塊等幾大部分組成。各模塊由主控制模塊按任務管理機制實時進行統(tǒng)一調(diào)度,分配運行時間,進行數(shù)據(jù)和信號的交換。
為了實現(xiàn)預期的CAN總線調(diào)度算法,將節(jié)點的11位ID分解為3 + 8位的形式,前3位定義為組號。每個節(jié)點占用二個ID,同一節(jié)點ID的后8位相同,前3位用來區(qū)分時間觸發(fā)報文組與事件觸發(fā)報文組,并且時間觸發(fā)報文組的優(yōu)先級設(shè)置比事件觸發(fā)報文組的優(yōu)先級高。在調(diào)度表中,安排先發(fā)送時間觸發(fā)報文,發(fā)送完畢后,再允許各節(jié)點發(fā)送事件觸發(fā)報文。發(fā)送時間觸發(fā)報文時,高優(yōu)先級節(jié)點的報文先發(fā)送,在該期間,由調(diào)度表確保僅有一個節(jié)點獲取總線控制權(quán)。在一個調(diào)度周期內(nèi),只有一個時間窗用于各節(jié)點發(fā)送事件觸發(fā)報文,該時間窗的大小,可根據(jù)實際使用情況,在調(diào)度表中靈活安排。若多個節(jié)點同時發(fā)送事件觸發(fā)報文,則依據(jù)CAN總線的位仲裁機制,以及動態(tài)優(yōu)先級調(diào)度算法來進行競爭,獲取總線控制權(quán)的節(jié)點發(fā)送報文。
實踐證明,這種結(jié)合了TTCAN技術(shù)和動態(tài)晉升機制的調(diào)度算法,在整車電子控制網(wǎng)絡中起到了至關(guān)重要的作用,各個子系統(tǒng)之間數(shù)據(jù)傳輸?shù)膶崟r性以及通信質(zhì)量都得到了明顯的改善。
版權(quán)與免責聲明
凡本網(wǎng)注明“出處:維庫電子市場網(wǎng)”的所有作品,版權(quán)均屬于維庫電子市場網(wǎng),轉(zhuǎn)載請必須注明維庫電子市場網(wǎng),http://hbjingang.com,違反者本網(wǎng)將追究相關(guān)法律責任。
本網(wǎng)轉(zhuǎn)載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點或證實其內(nèi)容的真實性,不承擔此類作品侵權(quán)行為的直接責任及連帶責任。其他媒體、網(wǎng)站或個人從本網(wǎng)轉(zhuǎn)載時,必須保留本網(wǎng)注明的作品出處,并自負版權(quán)等法律責任。
如涉及作品內(nèi)容、版權(quán)等問題,請在作品發(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。
- USB-C接口全解析:協(xié)議兼容、快充原理與常見問題排查2025/12/16 9:50:42
- 簡述計算機總線的分類2025/9/4 17:12:23
- 深度剖析三進線兩母聯(lián)供電系統(tǒng)設(shè)計方案2025/9/3 10:37:39
- 匯流排是什么匯流排好還是線接好2025/8/28 17:13:00
- 安森美 USB - C 電池充電器解決方案2025/8/28 15:45:10



