





測速發(fā)電機電機速度反饋電路
出處:維庫電子市場網(wǎng) 發(fā)布于:2023-02-01 17:05:00 | 384 次閱讀
大多數(shù)電池電機速度控制器都是手動控制的,操作員會自動調(diào)整速度以滿足需求。在這些條件下,閉環(huán)電機速度控制是不必要的開支。然而,當需要時,可以很容易地添加測速發(fā)電機。
真正的測速發(fā)電機通常很昂貴——這讓大多數(shù)潛在用戶望而卻步。費用是因為它們的制造和校準非常精確。它們也是小批量商品。然而,對于大多數(shù)用途,小型永磁電機就足夠了。它不會帶有準確的“每轉(zhuǎn)電壓伏特”校準,并且可能(只是可能)漂移數(shù)年。對于大多數(shù)目的,這根本無關緊要!
對于任何測速反饋系統(tǒng),環(huán)路增益(控制器、電機、測速、測速放大器)不得超過統(tǒng)一或不穩(wěn)定結(jié)果。
更簡單地說:反饋系統(tǒng)必須改變電機的輸出電壓,使電機電壓升高以精確匹配電流流動引起的電機電樞壓降,從而使機械速度保持恒定。
如果環(huán)路過度補償,那么電機在加載時會轉(zhuǎn)得太快并且會“搜索” - 速度會不穩(wěn)定并且會反彈。如果補償太少 - 性能將達不到最佳狀態(tài)。
但是 - 有很多變量,包括電池電壓和電機溫度。一個理想的系統(tǒng)會測量一切并對其進行補償(而且非常昂貴!)。在實踐中,調(diào)整非常簡單:您只需將一個電位器與用作測速發(fā)電機的電機串聯(lián)起來,然后對其進行調(diào)整,直到電機開始擺動(顯示速度變化),然后稍微后退一點,直到它稍微低于最佳值。
測速發(fā)電機整流器:電路
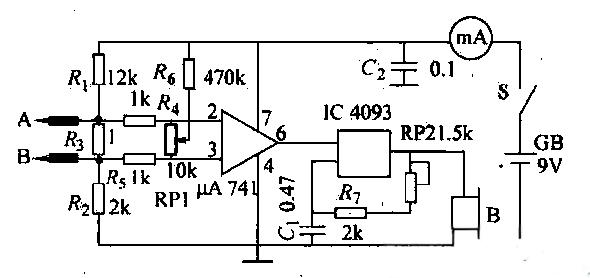
除了作為我們的 TFB,其中一部分(四路運算放大器的 3 個 LH 部分)實際上是我們在 4QD 系列控制器中使用的電路,用于提供電樞電壓反饋。它是一個帶有誤差放大器的精密整流電路,它可以檢測電樞電壓或測速發(fā)電機的電壓以提供閉環(huán)控制。
輸出級是一個積分器,用于去除誤差信號的直流分量。
該電路使用四路運算放大器 LM324。前兩級是直接差分放大器,用于比較測速發(fā)電機的兩條電線。一個適用于正電壓,另一個適用于負電壓。
現(xiàn)在該電路使用單電源供電。因此運算放大器輸出不能擺動負。因此,一個放大器為測速發(fā)電機的一個方向提供正輸出,而另一個為反向提供正輸出。運算放大器的第三部分對輸出求和,結(jié)果是輸入的整流版本。
因此,使用運算放大器存在障礙。在應該擺動負輸出的輸入上,運算放大器實際上是截止的,輸出不導通。輸入超出了它們的工作范圍,因此它們無法鉗制控制信號。然后有一個直接的前饋路徑通過“反饋”電阻器到不工作的輸出。
該機制解釋了運算放大器前兩級輸出到地的 10K 負載電阻。這些與前饋路徑中的 3 個 100K 電阻一起構(gòu)成了一個衰減器,從而將前饋誤差降低到 3% 左右。瀏覽器可能會感興趣,因為該電路最初是與 LM3900(諾頓運算放大器)一起使用的,其中輸入永遠不會超過 0v 以上的晶體管 Vbe。這樣,前饋效應不明顯,也不需要鉗位電阻。您會注意到的 LM3900 電路沒有顯示輸出積分器。
第四階段將整流后的測速發(fā)電機電壓與需求速度進行比較,對差值進行積分并給出輸出以驅(qū)動 PWM 調(diào)制器。
我不打算進入數(shù)學,但是,如果你不把事情弄對,測速反饋電路可能會出現(xiàn)可怕的錯誤。電機是機械的東西,需要時間來做出反應。如果控制信號的反應速度比電機快,那么它將反應過度并導致振蕩環(huán)路。
此外,電機速度控制的精度取決于(如您所料)反饋回路內(nèi)的增益。但如果增益太大,則會產(chǎn)生反饋振蕩器。
真正的測速發(fā)電機通常很昂貴——這讓大多數(shù)潛在用戶望而卻步。費用是因為它們的制造和校準非常精確。它們也是小批量商品。然而,對于大多數(shù)用途,小型永磁電機就足夠了。它不會帶有準確的“每轉(zhuǎn)電壓伏特”校準,并且可能(只是可能)漂移數(shù)年。對于大多數(shù)目的,這根本無關緊要!
對于任何測速反饋系統(tǒng),環(huán)路增益(控制器、電機、測速、測速放大器)不得超過統(tǒng)一或不穩(wěn)定結(jié)果。
更簡單地說:反饋系統(tǒng)必須改變電機的輸出電壓,使電機電壓升高以精確匹配電流流動引起的電機電樞壓降,從而使機械速度保持恒定。
如果環(huán)路過度補償,那么電機在加載時會轉(zhuǎn)得太快并且會“搜索” - 速度會不穩(wěn)定并且會反彈。如果補償太少 - 性能將達不到最佳狀態(tài)。
但是 - 有很多變量,包括電池電壓和電機溫度。一個理想的系統(tǒng)會測量一切并對其進行補償(而且非常昂貴!)。在實踐中,調(diào)整非常簡單:您只需將一個電位器與用作測速發(fā)電機的電機串聯(lián)起來,然后對其進行調(diào)整,直到電機開始擺動(顯示速度變化),然后稍微后退一點,直到它稍微低于最佳值。
測速發(fā)電機整流器:電路
除了作為我們的 TFB,其中一部分(四路運算放大器的 3 個 LH 部分)實際上是我們在 4QD 系列控制器中使用的電路,用于提供電樞電壓反饋。它是一個帶有誤差放大器的精密整流電路,它可以檢測電樞電壓或測速發(fā)電機的電壓以提供閉環(huán)控制。
輸出級是一個積分器,用于去除誤差信號的直流分量。

該電路使用四路運算放大器 LM324。前兩級是直接差分放大器,用于比較測速發(fā)電機的兩條電線。一個適用于正電壓,另一個適用于負電壓。
現(xiàn)在該電路使用單電源供電。因此運算放大器輸出不能擺動負。因此,一個放大器為測速發(fā)電機的一個方向提供正輸出,而另一個為反向提供正輸出。運算放大器的第三部分對輸出求和,結(jié)果是輸入的整流版本。
因此,使用運算放大器存在障礙。在應該擺動負輸出的輸入上,運算放大器實際上是截止的,輸出不導通。輸入超出了它們的工作范圍,因此它們無法鉗制控制信號。然后有一個直接的前饋路徑通過“反饋”電阻器到不工作的輸出。
該機制解釋了運算放大器前兩級輸出到地的 10K 負載電阻。這些與前饋路徑中的 3 個 100K 電阻一起構(gòu)成了一個衰減器,從而將前饋誤差降低到 3% 左右。瀏覽器可能會感興趣,因為該電路最初是與 LM3900(諾頓運算放大器)一起使用的,其中輸入永遠不會超過 0v 以上的晶體管 Vbe。這樣,前饋效應不明顯,也不需要鉗位電阻。您會注意到的 LM3900 電路沒有顯示輸出積分器。
第四階段將整流后的測速發(fā)電機電壓與需求速度進行比較,對差值進行積分并給出輸出以驅(qū)動 PWM 調(diào)制器。
我不打算進入數(shù)學,但是,如果你不把事情弄對,測速反饋電路可能會出現(xiàn)可怕的錯誤。電機是機械的東西,需要時間來做出反應。如果控制信號的反應速度比電機快,那么它將反應過度并導致振蕩環(huán)路。
此外,電機速度控制的精度取決于(如您所料)反饋回路內(nèi)的增益。但如果增益太大,則會產(chǎn)生反饋振蕩器。
0次
下一篇:測試斜坡發(fā)生器
版權與免責聲明
凡本網(wǎng)注明“出處:維庫電子市場網(wǎng)”的所有作品,版權均屬于維庫電子市場網(wǎng),轉(zhuǎn)載請必須注明維庫電子市場網(wǎng),http://hbjingang.com,違反者本網(wǎng)將追究相關法律責任。
本網(wǎng)轉(zhuǎn)載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點或證實其內(nèi)容的真實性,不承擔此類作品侵權行為的直接責任及連帶責任。其他媒體、網(wǎng)站或個人從本網(wǎng)轉(zhuǎn)載時,必須保留本網(wǎng)注明的作品出處,并自負版權等法律責任。
如涉及作品內(nèi)容、版權等問題,請在作品發(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關權利。


電路圖分類
廣告

熱門電路圖
最新電路圖


