控制系統(tǒng)設計基礎知識
出處:維庫電子市場網 發(fā)布于:2023-07-18 16:52:28 | 592 次閱讀
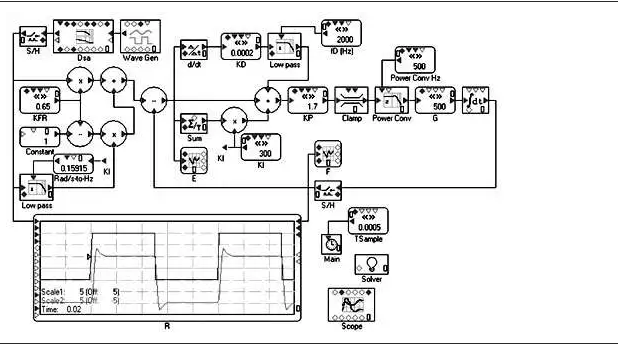
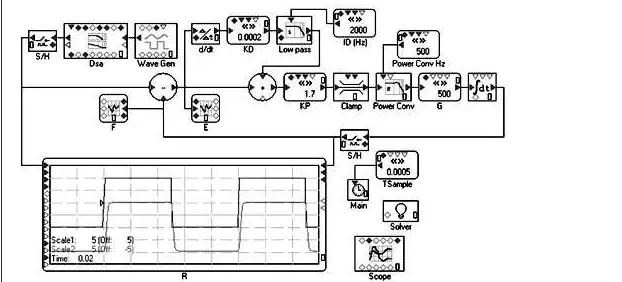
本系列文章中討論的第五個控制器是 PID+:使用命令過濾器修改的 PID 控制器(如下圖 6-24)。與 PI+ 一樣,PID+ 的目標是允許更高的積分增益以改善直流剛度。同樣,輸入濾波器消除了由高積分增益引起的峰值;與 PI+ 一樣,命令響應會隨著剛度的提高而受到影響。
調節(jié) PID+ 控制器與調節(jié) PID 控制器相同,只是必須在調節(jié)積分增益之前選擇 KFR 值(類似于 PI+)。其流程如下圖6-25所示。
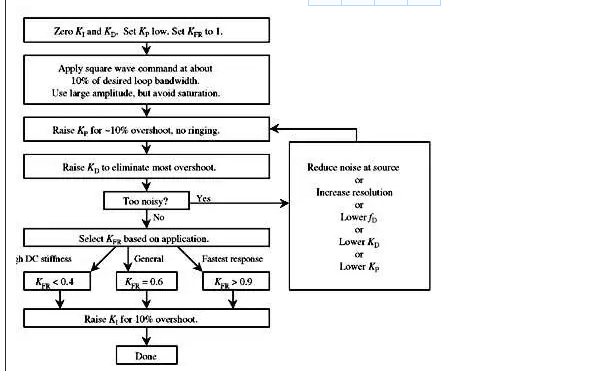
上面圖6-25的調整過程的結果如圖6-24和下面的圖6-26和圖6-27 所示。積分增益從 PID 控制器中的 120 增加到 300。
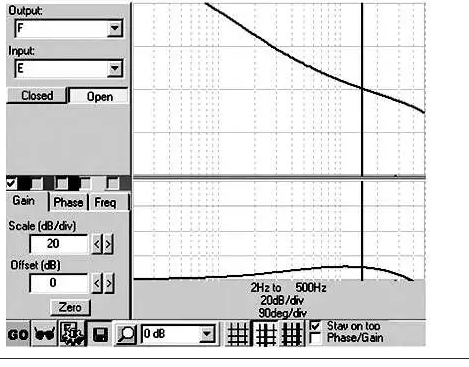
閉環(huán)波特圖顯示帶寬從 PID 控制器的 359 Hz 降至 282 Hz。然而,PID+控制器只有140°的相位滯后,優(yōu)于閉環(huán)PID控制器的170°相位滯后。
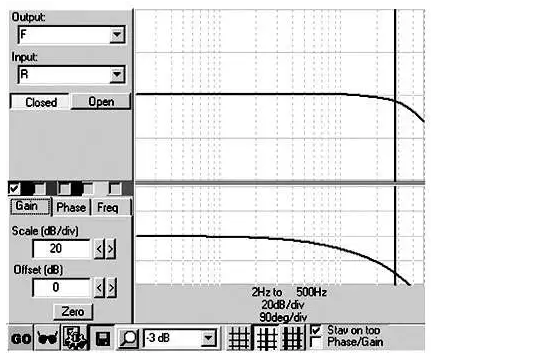
比較 PID+ 和 PI+ 控制器,D 增益的引入使 PID+ 控制器具有更高的帶寬(282 Hz 與 180 Hz 相比)和類似的 DC 剛度,如積分增益 (300) 所示。
如下圖 6-27所示,PID+控制器的 GM 與 PID 控制器相似,但 PM 為 45°,比 PID 控制器小 10°。這是預料之中的;與 PI+ 控制器一樣,命令過濾器允許控制器以較低的 PM 工作。
PD 控制
本系列介紹的第六個控制器是 PD 控制器。這里,P 控制器增加了 D 項,以允許更高的比例增益。控制器如下圖6-28所示。它與 I 增益為零的 PID 控制器相同。
調節(jié) PD 控制器(如下圖 6-29)與調節(jié) PID 控制器相同,但假設 KI 為零。噪聲的影響與 PID 控制器所經歷的影響相同。
這允許更高的帶寬(PD 控制器為 353 Hz,而 P 控制器為 186 Hz),盡管該帶寬下的相位滯后要高得多(PD 控制器為 162°,而 P 控制器為 110°)。與 PID 控制器一樣,PD 控制器速度很快,但更容易出現穩(wěn)定性問題。
此外,GM 更小(8.8 dB,比 Pcontroller 低 3 dB)。PD 控制器在需要最快響應的情況下非常有用。
選擇控制器
本系列六個控制器的調整結果列于下表 6-3。每個控制器都有其優(yōu)點和缺點。簡單的 P 控制器提供適合許多應用的性能。
I 項的引入提供了直流剛度,但減少了 PM。PI+ 和 PID+ 中的命令濾波器允許更高的直流剛度,但減少了帶寬。
D 項提供了更高的響應能力,但會侵蝕增益裕度并增加相移,如果該環(huán)路要在外環(huán)路中閉合,則這是一個缺點。
圖表提供了選擇控制器的過程。首先確定應用是否需要D增益;如果不是,請避免使用它,因為它會增加復雜性,增加噪聲敏感性,并竊取增益裕度。
接下來,確保應用程序可以支持D增益;有噪聲的系統(tǒng)可能無法在差分增益下正常工作。之后,檢查應用程序所需的直流剛度。
如果不需要,請避免積分增益。如果需要,請使用標準形式(PI 或 PID);如果需要最大直流剛度,請使用 PI+ 或 PID+ 控制添加輸入濾波器。
版權與免責聲明
凡本網注明“出處:維庫電子市場網”的所有作品,版權均屬于維庫電子市場網,轉載請必須注明維庫電子市場網,http://hbjingang.com,違反者本網將追究相關法律責任。
本網轉載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網贊同其觀點或證實其內容的真實性,不承擔此類作品侵權行為的直接責任及連帶責任。其他媒體、網站或個人從本網轉載時,必須保留本網注明的作品出處,并自負版權等法律責任。
如涉及作品內容、版權等問題,請在作品發(fā)表之日起一周內與本網聯系,否則視為放棄相關權利。