





3.5a 4.5-44V H橋直流電機驅(qū)動器模塊使用東芝TB67H450AFNG
出處:維庫電子市場網(wǎng) 發(fā)布于:2025-02-06 17:10:54 | 487 次閱讀
此芯片來設(shè)計一個雙單獨的H橋直流電機驅(qū)動器作為一個模塊,該模塊可以垂直安裝在PCB主板上或使用螺釘安裝在外殼上。
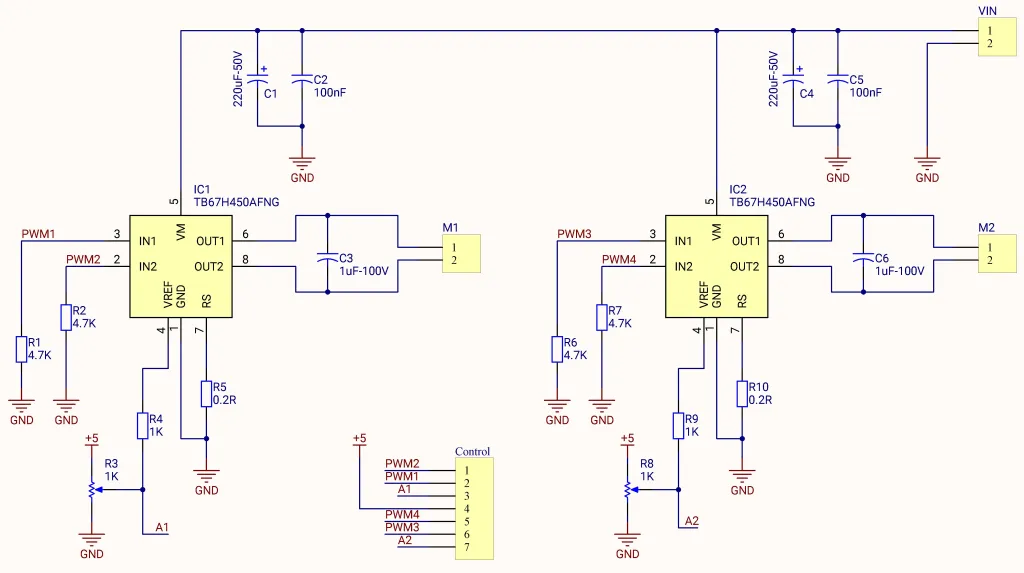
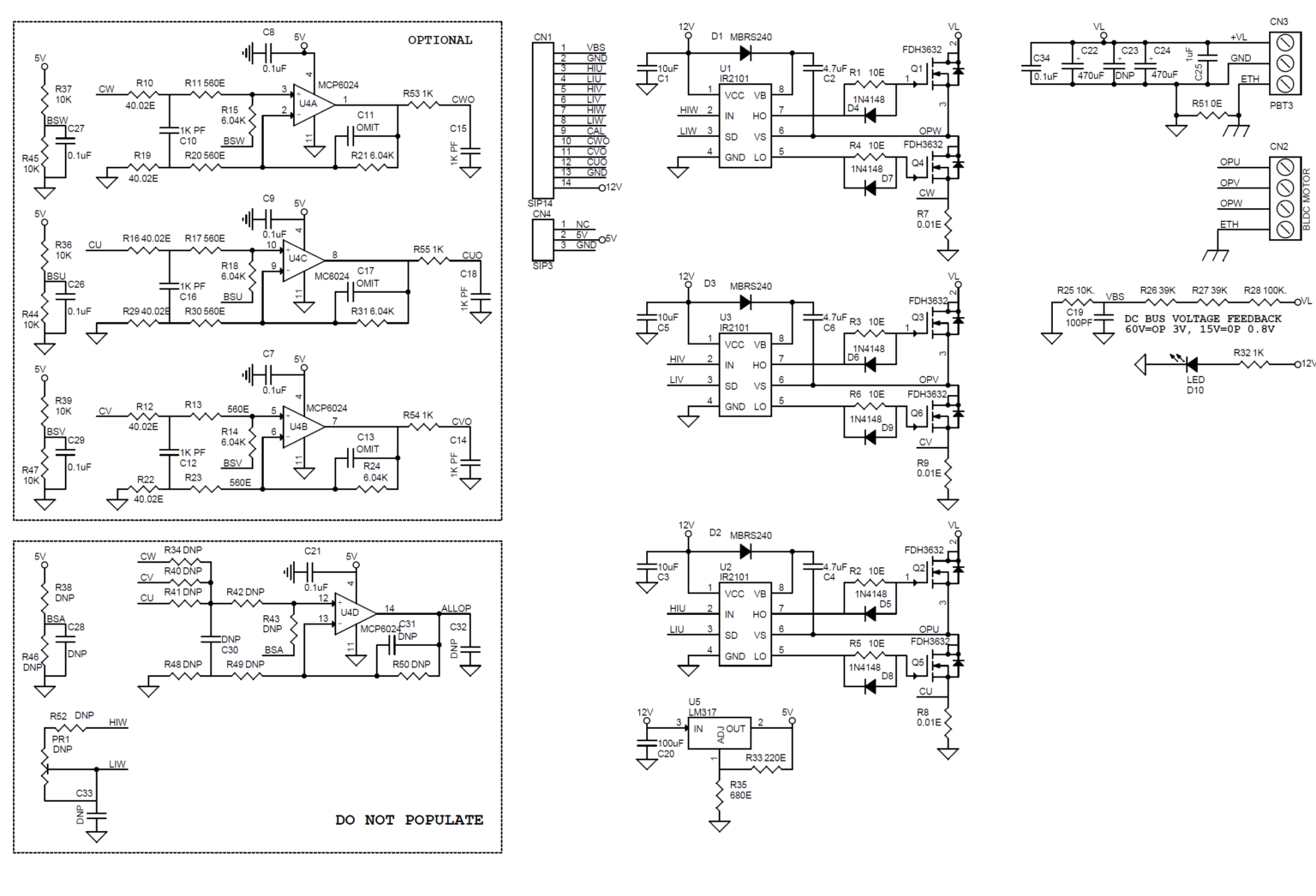
電路分析 圖1顯示了模塊的示意圖。 IC1和IC2是驅(qū)動器芯片[1],兩個電位計調(diào)節(jié)當前限制。該電路被設(shè)計為“通用”,以覆蓋整個電壓范圍,電流調(diào)整和雙電動機。
根據(jù)數(shù)據(jù)表,駕駛員芯片提供了以下功能:
使用BICD過程的單片IC
能夠PWM恒定電流驅(qū)動器和直接PWM驅(qū)動器
支持4個操作模式,向前 /反向 /制動 /停止(關(guān)閉)
內(nèi)置輸出MOSFET具有低抗性(高側(cè) +低側(cè)=0.6Ω(typ。))
實現(xiàn)高壓和大電流驅(qū)動器(請參閱“絕對最大評分”和“工作范圍”。)
內(nèi)置的各種錯誤檢測功能(熱關(guān)閉(TSD),當前檢測(ISD)和底電壓鎖定(UVLO))
內(nèi)置VCC調(diào)節(jié)器用于內(nèi)部電路操作。
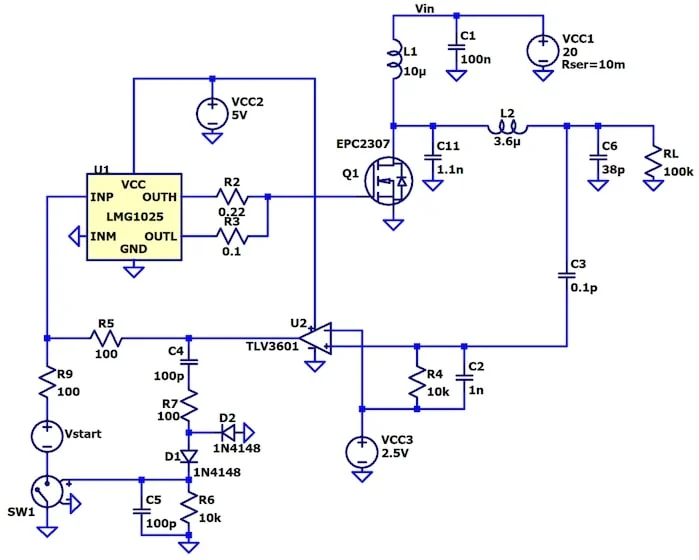
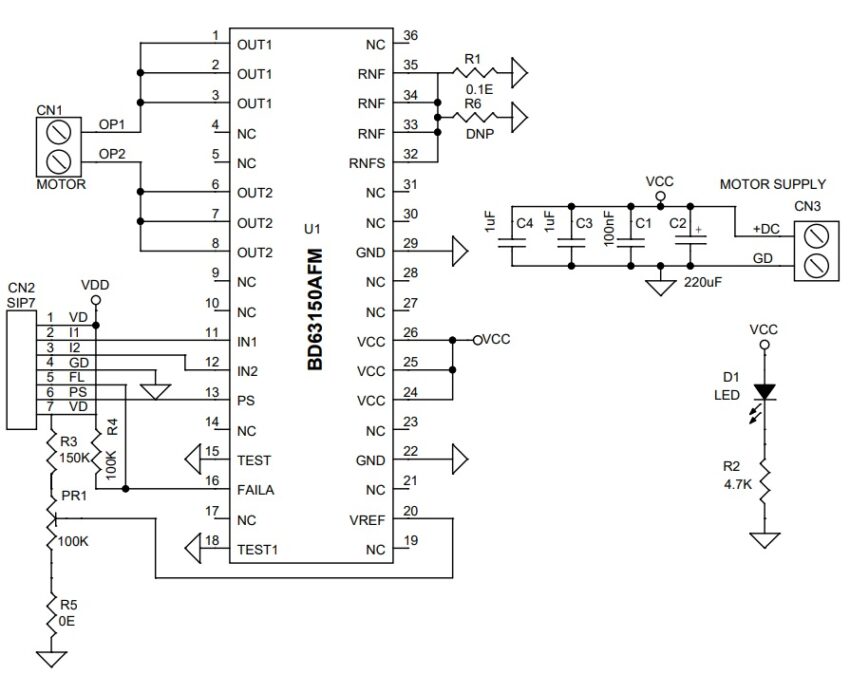
圖2顯示了TB67H450FNG芯片的框圖。
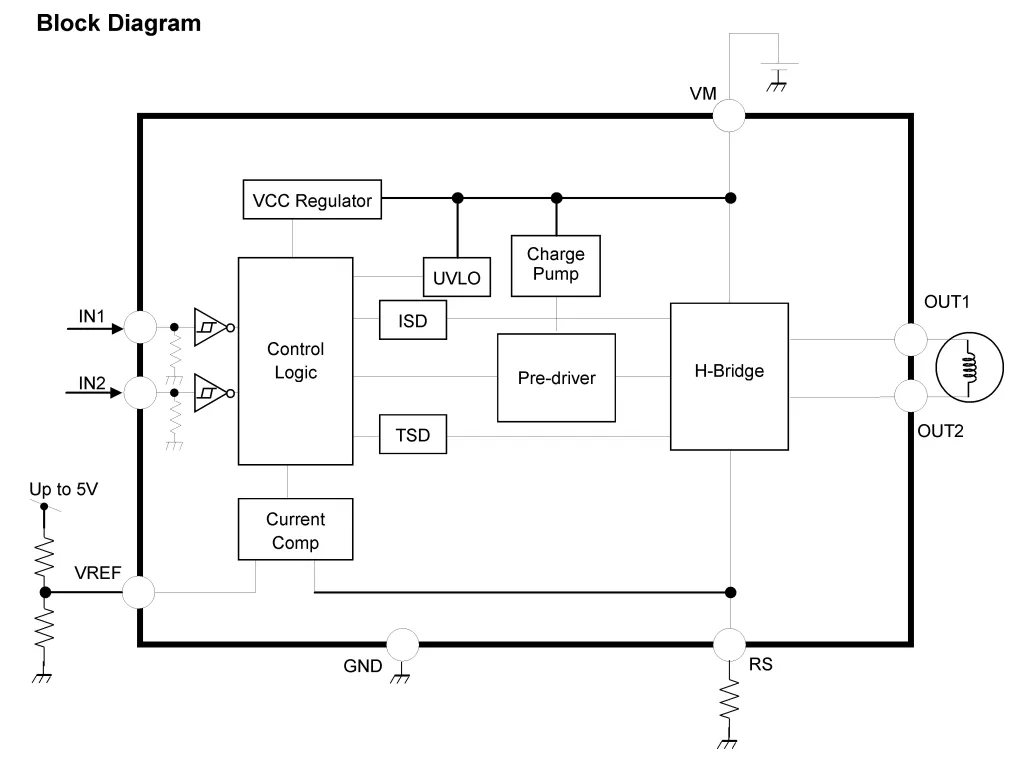 圖2:TB67H450FNG的框圖
圖2:TB67H450FNG的框圖
R1,R2,R6和R7是下拉電阻,以避免輸入引腳的不必要觸發(fā)。數(shù)據(jù)表不使用外部電阻推動,但是,具有其他類似電路的個人經(jīng)驗(作者),驅(qū)動程序ICS表明,通常在PWM輸入中需要“更強”的下拉點。旁路電容器C1-C2和C4-C5穩(wěn)定驅(qū)動器,減少輸入噪聲并軟化液電流。
C2和C5是針對高頻噪聲的100NF電容器。 C3和C6是1UF-100V輸出電容器,可潮濕電感載荷(電動機)尖峰。出于相同的目的,您可以盡可能靠近電動機輸入連接器焊接相似的電容器(非極化)。電動機上的小鐵氧體珠顯著減少輻射發(fā)射。
R4和R9是VREF引腳的電流電阻器,因為它們在當前調(diào)整期間的電壓可能最高為5V,而VREF引腳的最大“正常”電壓為4.0V。 VREF引腳受到內(nèi)部二極管的保護,以防止更高的電壓和瞬變,因此電阻器限制了電流,并且保護二極管降低了電壓而不會損壞。
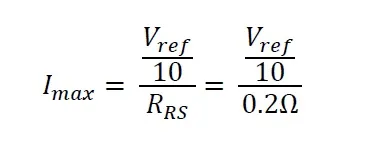
R3和R8是用于調(diào)節(jié)當前限制的多屈球電位計。當前極限水平也可以使用MCU或類似外部電路的數(shù)字到分析引腳進行外部設(shè)置。在這種情況下,您不應(yīng)安裝電位儀,并且不需要 +5V連接。 R5和R10是RS引腳的當前感官電阻。可以使用以下公式計算電動機的最大電流(電流極限閾值):
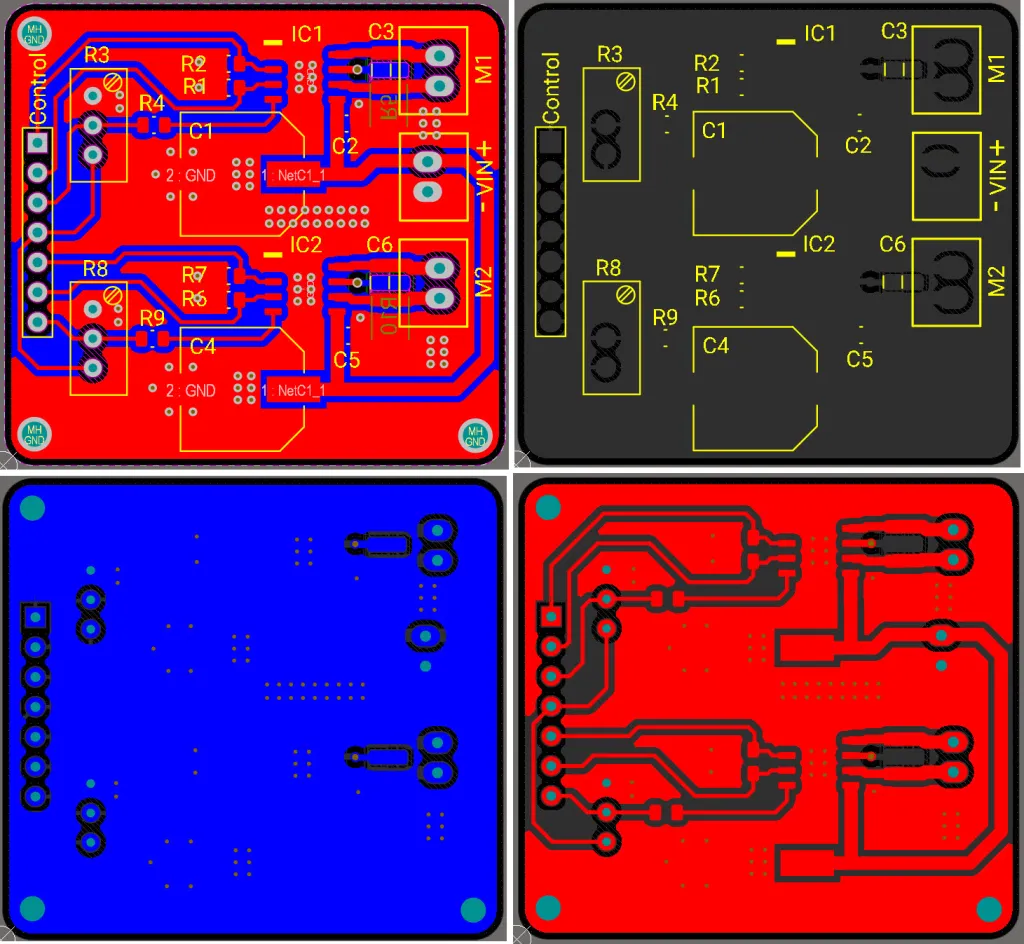
PCB布局 圖3顯示了模塊的PCB布局[2]。這是一個兩層PCB板,底層是堅固的(幾乎)接地平面。最小的組件包裝尺寸為0805,因此,如果沒有微焊接站,則可以使用普通焊接的組件焊接組件。
頂層(紅色)的地面路徑?jīng)]有循環(huán),而與地面的唯一連接點是通過VIN連接器(單個接地連接)。整個電路和所有輸入外部電路(例如MCU)共享共同點。底層(藍色)是降低接地路徑的長度和阻抗的實心接地平面,出于類似的目的,已經(jīng)實施了多個VIA。結(jié)果是噪聲較低,EMI和更高的性能。駕駛員芯片下方的銅平面有助于更有效地散發(fā)熱量。圖4顯示了PCB板的接線圖和組裝圖。
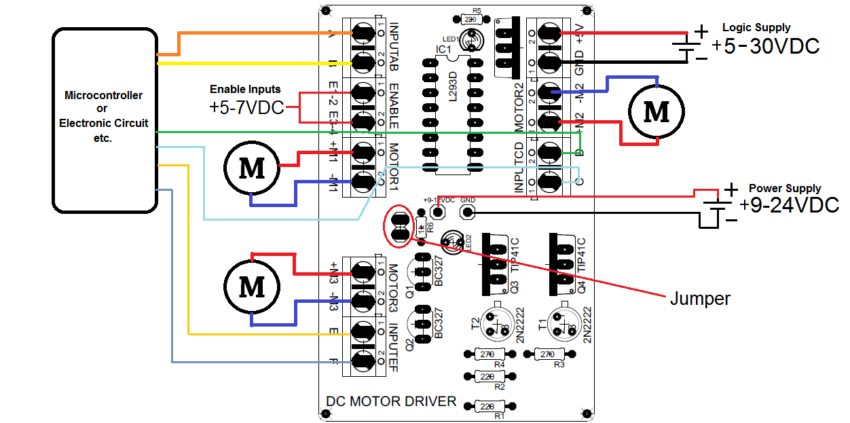
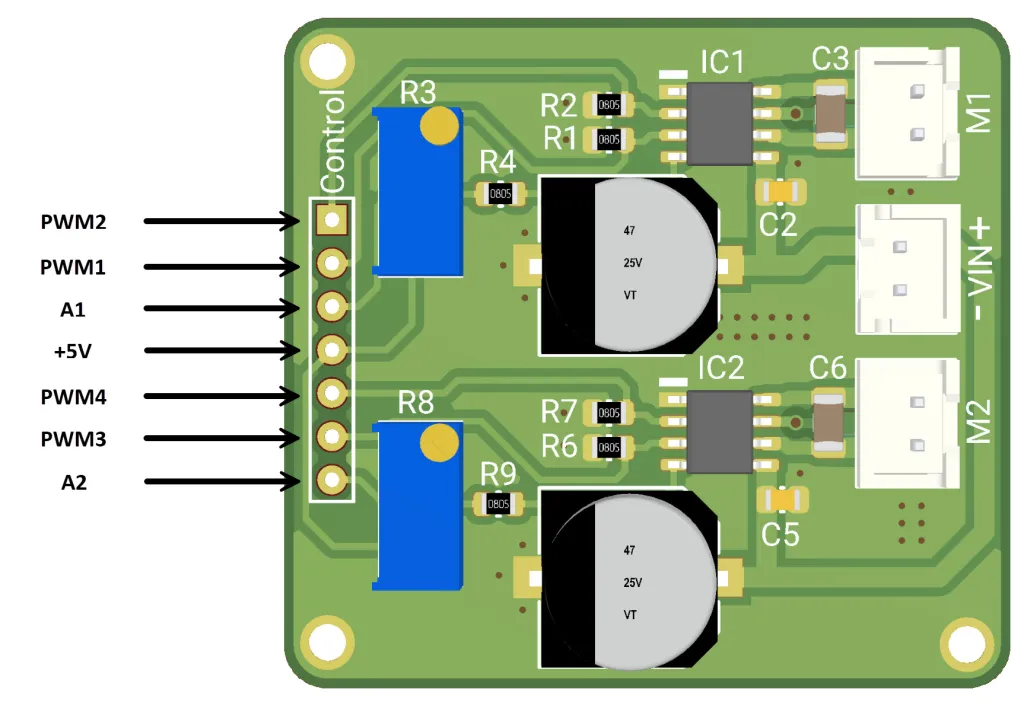 圖4:接線圖和組裝圖
圖4:接線圖和組裝圖
電路分析 圖1顯示了模塊的示意圖。 IC1和IC2是驅(qū)動器芯片[1],兩個電位計調(diào)節(jié)當前限制。該電路被設(shè)計為“通用”,以覆蓋整個電壓范圍,電流調(diào)整和雙電動機。
根據(jù)數(shù)據(jù)表,駕駛員芯片提供了以下功能:
使用BICD過程的單片IC
能夠PWM恒定電流驅(qū)動器和直接PWM驅(qū)動器
支持4個操作模式,向前 /反向 /制動 /停止(關(guān)閉)
內(nèi)置輸出MOSFET具有低抗性(高側(cè) +低側(cè)=0.6Ω(typ。))
實現(xiàn)高壓和大電流驅(qū)動器(請參閱“絕對最大評分”和“工作范圍”。)
內(nèi)置的各種錯誤檢測功能(熱關(guān)閉(TSD),當前檢測(ISD)和底電壓鎖定(UVLO))
內(nèi)置VCC調(diào)節(jié)器用于內(nèi)部電路操作。
圖2顯示了TB67H450FNG芯片的框圖。
圖2:TB67H450FNG的框圖R1,R2,R6和R7是下拉電阻,以避免輸入引腳的不必要觸發(fā)。數(shù)據(jù)表不使用外部電阻推動,但是,具有其他類似電路的個人經(jīng)驗(作者),驅(qū)動程序ICS表明,通常在PWM輸入中需要“更強”的下拉點。旁路電容器C1-C2和C4-C5穩(wěn)定驅(qū)動器,減少輸入噪聲并軟化液電流。
C2和C5是針對高頻噪聲的100NF電容器。 C3和C6是1UF-100V輸出電容器,可潮濕電感載荷(電動機)尖峰。出于相同的目的,您可以盡可能靠近電動機輸入連接器焊接相似的電容器(非極化)。電動機上的小鐵氧體珠顯著減少輻射發(fā)射。
R4和R9是VREF引腳的電流電阻器,因為它們在當前調(diào)整期間的電壓可能最高為5V,而VREF引腳的最大“正常”電壓為4.0V。 VREF引腳受到內(nèi)部二極管的保護,以防止更高的電壓和瞬變,因此電阻器限制了電流,并且保護二極管降低了電壓而不會損壞。
R3和R8是用于調(diào)節(jié)當前限制的多屈球電位計。當前極限水平也可以使用MCU或類似外部電路的數(shù)字到分析引腳進行外部設(shè)置。在這種情況下,您不應(yīng)安裝電位儀,并且不需要 +5V連接。 R5和R10是RS引腳的當前感官電阻。可以使用以下公式計算電動機的最大電流(電流極限閾值):
PCB布局 圖3顯示了模塊的PCB布局[2]。這是一個兩層PCB板,底層是堅固的(幾乎)接地平面。最小的組件包裝尺寸為0805,因此,如果沒有微焊接站,則可以使用普通焊接的組件焊接組件。
頂層(紅色)的地面路徑?jīng)]有循環(huán),而與地面的唯一連接點是通過VIN連接器(單個接地連接)。整個電路和所有輸入外部電路(例如MCU)共享共同點。底層(藍色)是降低接地路徑的長度和阻抗的實心接地平面,出于類似的目的,已經(jīng)實施了多個VIA。結(jié)果是噪聲較低,EMI和更高的性能。駕駛員芯片下方的銅平面有助于更有效地散發(fā)熱量。圖4顯示了PCB板的接線圖和組裝圖。
圖4:接線圖和組裝圖
0次
版權(quán)與免責聲明
凡本網(wǎng)注明“出處:維庫電子市場網(wǎng)”的所有作品,版權(quán)均屬于維庫電子市場網(wǎng),轉(zhuǎn)載請必須注明維庫電子市場網(wǎng),http://hbjingang.com,違反者本網(wǎng)將追究相關(guān)法律責任。
本網(wǎng)轉(zhuǎn)載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點或證實其內(nèi)容的真實性,不承擔此類作品侵權(quán)行為的直接責任及連帶責任。其他媒體、網(wǎng)站或個人從本網(wǎng)轉(zhuǎn)載時,必須保留本網(wǎng)注明的作品出處,并自負版權(quán)等法律責任。
如涉及作品內(nèi)容、版權(quán)等問題,請在作品發(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。
電路圖分類
廣告

熱門電路圖
最新電路圖


