





揭秘人形機(jī)器人電機(jī)控制:從原理到應(yīng)用
出處:網(wǎng)絡(luò) 發(fā)布于:2025-05-06 15:25:22 | 407 次閱讀
在當(dāng)今科技飛速發(fā)展的時代,制造業(yè)和服務(wù)行業(yè)對更高自動化水平的需求不斷攀升,這一趨勢極大地推動了人形機(jī)器人的研發(fā)進(jìn)程。如今的人形機(jī)器人正朝著更加復(fù)雜、精確的方向發(fā)展,其自由度(DOF)顯著提高,對周圍環(huán)境的響應(yīng)時間縮短至毫秒級,從而能夠更加逼真地模仿人類的動作。圖 1 清晰地展示了人形機(jī)器人的典型電機(jī)和運動功能。
更高的自由度意味著人形機(jī)器人需要配備更多的電機(jī)驅(qū)動器。而機(jī)器人設(shè)計中驅(qū)動器的位置決定了不同的驅(qū)動器要求,其中部分關(guān)鍵規(guī)格包括通信接口架構(gòu)、位置感測、電機(jī)類型、電機(jī)控制算法、功率級要求、電子電路尺寸以及功能安全注意事項等。
目前,雖然針對協(xié)作機(jī)器人和工業(yè)機(jī)器人已經(jīng)制定了相關(guān)標(biāo)準(zhǔn),但專門規(guī)定人形機(jī)器人功能安全要求的標(biāo)準(zhǔn)尚未出臺。隨著市場對人形機(jī)器人的需求持續(xù)增長,預(yù)計標(biāo)準(zhǔn)機(jī)構(gòu)未來會制定相應(yīng)的安全要求。在此之前,人形機(jī)器人設(shè)計人員必須對當(dāng)前的系統(tǒng)設(shè)計進(jìn)行全面調(diào)查,以便在未來盡可能減少因重新設(shè)計帶來的工作量。ISO13482、ISO10218 和 ISO 3691 - 4 等標(biāo)準(zhǔn)可以為未來的設(shè)計提供一定的參考和預(yù)期。
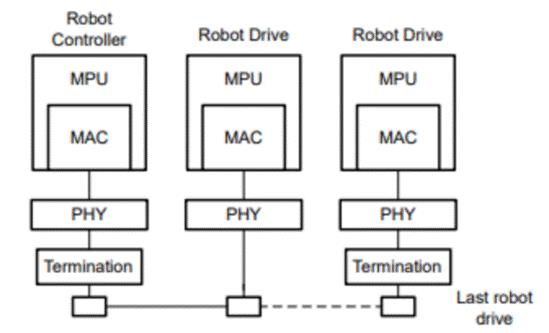
通信接口架構(gòu) 鑒于驅(qū)動器在機(jī)器人中的位置分布,優(yōu)化與所有驅(qū)動器的通信并最大限度減少布線數(shù)量至關(guān)重要。實現(xiàn)優(yōu)化的方法有多種,其中最常用的是菊花鏈通信和線性總線拓?fù)洌謩e如圖 2 和圖 3 所示。
通常情況下,通信系統(tǒng)的最低帶寬要求約為 8Mbit。然而,隨著設(shè)計趨勢的發(fā)展,對系統(tǒng)診斷和安全功能的要求不斷提高。根據(jù)系統(tǒng)需求,人形機(jī)器人系統(tǒng)中常用的通信接口基于 CAN - FD 或以太網(wǎng)(包括 EtherCAT)。德州儀器(TI)提供物理層(PHY)收發(fā)器和嵌入式處理器,專門用于支持這些通信協(xié)議。CAN 收發(fā)器和以太網(wǎng) IC 是人形機(jī)器人系統(tǒng)開發(fā)中常用的器件。
位置檢測
人形機(jī)器人在運動過程中,必須獲取電機(jī)位置數(shù)據(jù)以進(jìn)行路徑規(guī)劃。位置數(shù)據(jù)是實現(xiàn)人形機(jī)器人受控移動的關(guān)鍵。為了實現(xiàn)高精度的受控移動,機(jī)器人需要配備轉(zhuǎn)子位置傳感器,以便在電機(jī)上捕獲信息,并通過電機(jī)驅(qū)動器將信息高效地傳遞到中央處理計算機(jī)。根據(jù)所需的電機(jī)精度,可以選擇多種轉(zhuǎn)子位置傳感器,以下是一些最常用的編碼器:
光學(xué)編碼器:具有高精度、高分辨率的特點,能夠提供準(zhǔn)確的位置信息。
磁性編碼器:抗干擾能力強(qiáng),適用于惡劣的工作環(huán)境。
增量編碼器:結(jié)構(gòu)簡單,成本較低,廣泛應(yīng)用于一般精度要求的場合。
SIN/COS 旋轉(zhuǎn)變壓器:可靠性高,能夠在高溫、高振動等惡劣條件下穩(wěn)定工作。
這些編碼器具有不同的接口,用于連接至驅(qū)動器并提供轉(zhuǎn)子角度數(shù)據(jù),在進(jìn)行位置控制時需要使用這些數(shù)據(jù)。這些接口需要特定的硬件支持,因此電機(jī)控制處理器至少需要支持以下編碼器配置之一:
專用串行接口,如 BiSS、Endat、Hiperface 或其他數(shù)字絕對編碼器。
具有采樣保持功能且適用于旋轉(zhuǎn)變壓器接口的 ADC 轉(zhuǎn)換器。
增量編碼器的正交編碼器脈沖。
用于接合磁性編碼器的串行接口。
一個電機(jī)可能需要多個編碼器,具體取決于電機(jī)和電機(jī)傳動裝置的實現(xiàn)方式。TI 提供模擬和處理器 IC 來實現(xiàn)編碼器接口系統(tǒng)。在位置感測方法中,還使用了 RS - 485 和 RS - 422 收發(fā)器以及多軸線性和角度位置傳感器。
電機(jī)類型
由于人形機(jī)器人通常采用電池供電,因此電機(jī)驅(qū)動器的設(shè)計目標(biāo)是最大限度地提高效率,以延長機(jī)器人的工作時間。
當(dāng)需要高功率輸出時,人形機(jī)器人可以集成永磁同步電機(jī)(PMSM)等電機(jī)。有刷直流電機(jī)則適用于一些低功耗情況,例如手部控制和手指控制。不過,當(dāng)前的設(shè)計趨勢表明,未來所有電機(jī)都將朝著無刷式電機(jī)的方向發(fā)展。
PMSM 電機(jī)有梯形繞組和正弦繞組兩種繞組選擇。繞組和控制算法的選擇會對電機(jī)控制的精確度產(chǎn)生影響。此外,電機(jī)設(shè)計的另一個關(guān)鍵要素是更快地切換 FET,這樣可以采用新的設(shè)計選項來提高電機(jī)單位重量的扭矩。
電機(jī)控制算法 在選擇電機(jī)類型后,就需要確定控制電機(jī)的方法。實現(xiàn)控制回路有多種可選方法,但電機(jī)控制通常與圖 4 中所示的類似,該圖展示了所需的模擬子系統(tǒng)和處理器外設(shè)。
功率級要求
根據(jù)機(jī)器人的驅(qū)動器位置不同,功率級別在 10W 至 4kW 之間變化,大多數(shù)驅(qū)動器的功率在 10W 至 1.5kW 之間。
驅(qū)動器通常在低于 60V 的安全特低電壓(SELV)范圍內(nèi)工作。因此,組件必須能夠在最高達(dá) 60V 的電壓下正常工作。對于放大器、FET 和柵極驅(qū)動器,為了減輕系統(tǒng)中潛在噪聲的影響,最好使用最高可在 100V 電壓下運行的元件。
在確定驅(qū)動器的電氣規(guī)格后,還需要考慮其他設(shè)計因素。可用于實現(xiàn)印刷電路板(PCB)的物理尺寸是另一個重要的設(shè)計考慮因素。小尺寸 IC 和高度優(yōu)化的功率密度設(shè)計對于實現(xiàn)小空間設(shè)計目標(biāo)至關(guān)重要。高功率密度會導(dǎo)致機(jī)器人的潛在溫度限制,在該限制下機(jī)器人的外部溫度不得高于 55°C。因為在 55°C 時,30 秒內(nèi)就可能發(fā)生全厚度皮膚灼傷。而且溫度管理方法不得包括風(fēng)扇或液體等額外冷卻方式。
溫度管理和空間的平衡促成功率級相對于單位尺寸瓦特數(shù)的平衡,這會影響功率級架構(gòu)。可能需要解決的一個問題是,確定功率級是否需要在更高的頻率下工作。這一問題通常出現(xiàn)在 MOSFET 中,但與基于 MOSFET 的系統(tǒng)相比,GaN FET 等新技術(shù)可以提高開關(guān)性能。對于溫度敏感型系統(tǒng),與 MOSFET 技術(shù)相比,GaN FET 具有更高的理論效率,因為其開關(guān)損耗非常低。頻率的增加會要求 MCU 具備額外的功能,以便支持以足夠高的分辨率實現(xiàn)更高頻率開關(guān)所需的信號發(fā)送。
TI MOSFET 柵極驅(qū)動器能夠讓客戶以盡可能高的速度開關(guān) MOSFET,而 TI 低壓 GaN FET 則方便客戶快速比較和選擇機(jī)器人中每個位置的最佳 FET 類型。需要使用高性能 MOSFET 或 GaN FET 來實現(xiàn)驅(qū)動器,以提高電機(jī)效率。精密算法有助于減少電機(jī) FET 的開關(guān)需求和損耗。
人形機(jī)器人由電池供電,供電電壓通常為 48V,或者在 39V 至 54V 之間,具體取決于電池的電量狀態(tài)。使用的電壓取決于所設(shè)定的最小電池電量級別。前面提到,驅(qū)動器在 39V 時所需的最大功率為 4kW,可以看出,機(jī)器人驅(qū)動器需要在大約 102A 的電流下以最高效率工作來提供所需的功率,但同時要考慮到 0A 左右的精確測量,縮短 FET 的死區(qū)時間有利于 0A 左右電流測量的線性,使測量在低電流下更加精確。 在評估功率級要求和選擇適當(dāng)?shù)碾娏鳈z測器件以實現(xiàn)所需的性能水平時,電流檢測也是一個重要的設(shè)計考慮因素。TI 提供同相電流感測和低側(cè)電流感應(yīng)模擬選項,以及有關(guān)如何高效實現(xiàn)系統(tǒng)的設(shè)計指南。通常使用同相電流感測,以便始終能夠檢測電流并提高測量的精度。有三種不同的電流測量選項:
功能安全 在規(guī)劃未來的設(shè)計時,選擇能夠簡化功能安全認(rèn)證的器件非常重要。ISO13482、ISO10218 和 ISO 3691 - 4 標(biāo)準(zhǔn)為未來人形機(jī)器人的設(shè)計提供了預(yù)期方向。兩種 C 類標(biāo)準(zhǔn)(ISO10218 和 ISO3691 - 4)都參考了 ISO13849,規(guī)定系統(tǒng)必須達(dá)到性能等級 d(PLd)。但是,ISO3691 - 4 將架構(gòu)的確定權(quán)交給了實現(xiàn)者,而 ISO10218 則要求采用 CAT3 架構(gòu)。考慮到這些標(biāo)準(zhǔn)中的最糟糕情況,至少需要考慮人形機(jī)器人的 CAT3 PLD 安全注意事項。實現(xiàn) CAT3 系統(tǒng)時,必須采用圖 5 所示的安全架構(gòu)。
更高的自由度意味著人形機(jī)器人需要配備更多的電機(jī)驅(qū)動器。而機(jī)器人設(shè)計中驅(qū)動器的位置決定了不同的驅(qū)動器要求,其中部分關(guān)鍵規(guī)格包括通信接口架構(gòu)、位置感測、電機(jī)類型、電機(jī)控制算法、功率級要求、電子電路尺寸以及功能安全注意事項等。
目前,雖然針對協(xié)作機(jī)器人和工業(yè)機(jī)器人已經(jīng)制定了相關(guān)標(biāo)準(zhǔn),但專門規(guī)定人形機(jī)器人功能安全要求的標(biāo)準(zhǔn)尚未出臺。隨著市場對人形機(jī)器人的需求持續(xù)增長,預(yù)計標(biāo)準(zhǔn)機(jī)構(gòu)未來會制定相應(yīng)的安全要求。在此之前,人形機(jī)器人設(shè)計人員必須對當(dāng)前的系統(tǒng)設(shè)計進(jìn)行全面調(diào)查,以便在未來盡可能減少因重新設(shè)計帶來的工作量。ISO13482、ISO10218 和 ISO 3691 - 4 等標(biāo)準(zhǔn)可以為未來的設(shè)計提供一定的參考和預(yù)期。
通信接口架構(gòu) 鑒于驅(qū)動器在機(jī)器人中的位置分布,優(yōu)化與所有驅(qū)動器的通信并最大限度減少布線數(shù)量至關(guān)重要。實現(xiàn)優(yōu)化的方法有多種,其中最常用的是菊花鏈通信和線性總線拓?fù)洌謩e如圖 2 和圖 3 所示。
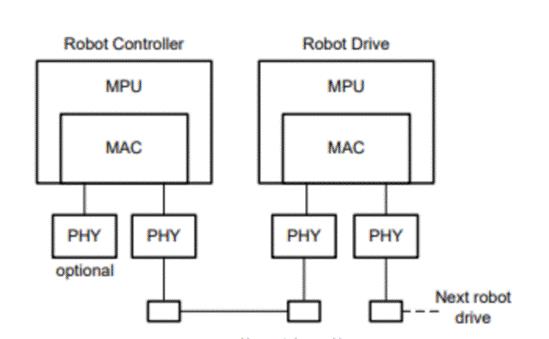
通常情況下,通信系統(tǒng)的最低帶寬要求約為 8Mbit。然而,隨著設(shè)計趨勢的發(fā)展,對系統(tǒng)診斷和安全功能的要求不斷提高。根據(jù)系統(tǒng)需求,人形機(jī)器人系統(tǒng)中常用的通信接口基于 CAN - FD 或以太網(wǎng)(包括 EtherCAT)。德州儀器(TI)提供物理層(PHY)收發(fā)器和嵌入式處理器,專門用于支持這些通信協(xié)議。CAN 收發(fā)器和以太網(wǎng) IC 是人形機(jī)器人系統(tǒng)開發(fā)中常用的器件。
位置檢測
人形機(jī)器人在運動過程中,必須獲取電機(jī)位置數(shù)據(jù)以進(jìn)行路徑規(guī)劃。位置數(shù)據(jù)是實現(xiàn)人形機(jī)器人受控移動的關(guān)鍵。為了實現(xiàn)高精度的受控移動,機(jī)器人需要配備轉(zhuǎn)子位置傳感器,以便在電機(jī)上捕獲信息,并通過電機(jī)驅(qū)動器將信息高效地傳遞到中央處理計算機(jī)。根據(jù)所需的電機(jī)精度,可以選擇多種轉(zhuǎn)子位置傳感器,以下是一些最常用的編碼器:
光學(xué)編碼器:具有高精度、高分辨率的特點,能夠提供準(zhǔn)確的位置信息。
磁性編碼器:抗干擾能力強(qiáng),適用于惡劣的工作環(huán)境。
增量編碼器:結(jié)構(gòu)簡單,成本較低,廣泛應(yīng)用于一般精度要求的場合。
SIN/COS 旋轉(zhuǎn)變壓器:可靠性高,能夠在高溫、高振動等惡劣條件下穩(wěn)定工作。
這些編碼器具有不同的接口,用于連接至驅(qū)動器并提供轉(zhuǎn)子角度數(shù)據(jù),在進(jìn)行位置控制時需要使用這些數(shù)據(jù)。這些接口需要特定的硬件支持,因此電機(jī)控制處理器至少需要支持以下編碼器配置之一:
專用串行接口,如 BiSS、Endat、Hiperface 或其他數(shù)字絕對編碼器。
具有采樣保持功能且適用于旋轉(zhuǎn)變壓器接口的 ADC 轉(zhuǎn)換器。
增量編碼器的正交編碼器脈沖。
用于接合磁性編碼器的串行接口。
一個電機(jī)可能需要多個編碼器,具體取決于電機(jī)和電機(jī)傳動裝置的實現(xiàn)方式。TI 提供模擬和處理器 IC 來實現(xiàn)編碼器接口系統(tǒng)。在位置感測方法中,還使用了 RS - 485 和 RS - 422 收發(fā)器以及多軸線性和角度位置傳感器。
電機(jī)類型
由于人形機(jī)器人通常采用電池供電,因此電機(jī)驅(qū)動器的設(shè)計目標(biāo)是最大限度地提高效率,以延長機(jī)器人的工作時間。
當(dāng)需要高功率輸出時,人形機(jī)器人可以集成永磁同步電機(jī)(PMSM)等電機(jī)。有刷直流電機(jī)則適用于一些低功耗情況,例如手部控制和手指控制。不過,當(dāng)前的設(shè)計趨勢表明,未來所有電機(jī)都將朝著無刷式電機(jī)的方向發(fā)展。
PMSM 電機(jī)有梯形繞組和正弦繞組兩種繞組選擇。繞組和控制算法的選擇會對電機(jī)控制的精確度產(chǎn)生影響。此外,電機(jī)設(shè)計的另一個關(guān)鍵要素是更快地切換 FET,這樣可以采用新的設(shè)計選項來提高電機(jī)單位重量的扭矩。
電機(jī)控制算法 在選擇電機(jī)類型后,就需要確定控制電機(jī)的方法。實現(xiàn)控制回路有多種可選方法,但電機(jī)控制通常與圖 4 中所示的類似,該圖展示了所需的模擬子系統(tǒng)和處理器外設(shè)。
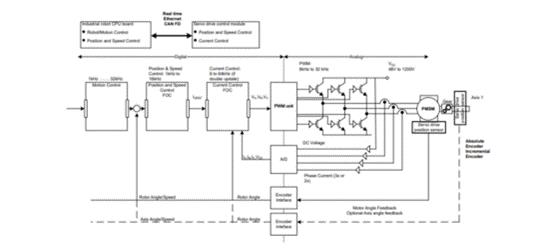
以圖 4 為通用模板,表 1 列出了在選擇算法 FOC 或阻塞換向時所需的外設(shè)和性能。

功率級要求
根據(jù)機(jī)器人的驅(qū)動器位置不同,功率級別在 10W 至 4kW 之間變化,大多數(shù)驅(qū)動器的功率在 10W 至 1.5kW 之間。
驅(qū)動器通常在低于 60V 的安全特低電壓(SELV)范圍內(nèi)工作。因此,組件必須能夠在最高達(dá) 60V 的電壓下正常工作。對于放大器、FET 和柵極驅(qū)動器,為了減輕系統(tǒng)中潛在噪聲的影響,最好使用最高可在 100V 電壓下運行的元件。
在確定驅(qū)動器的電氣規(guī)格后,還需要考慮其他設(shè)計因素。可用于實現(xiàn)印刷電路板(PCB)的物理尺寸是另一個重要的設(shè)計考慮因素。小尺寸 IC 和高度優(yōu)化的功率密度設(shè)計對于實現(xiàn)小空間設(shè)計目標(biāo)至關(guān)重要。高功率密度會導(dǎo)致機(jī)器人的潛在溫度限制,在該限制下機(jī)器人的外部溫度不得高于 55°C。因為在 55°C 時,30 秒內(nèi)就可能發(fā)生全厚度皮膚灼傷。而且溫度管理方法不得包括風(fēng)扇或液體等額外冷卻方式。
溫度管理和空間的平衡促成功率級相對于單位尺寸瓦特數(shù)的平衡,這會影響功率級架構(gòu)。可能需要解決的一個問題是,確定功率級是否需要在更高的頻率下工作。這一問題通常出現(xiàn)在 MOSFET 中,但與基于 MOSFET 的系統(tǒng)相比,GaN FET 等新技術(shù)可以提高開關(guān)性能。對于溫度敏感型系統(tǒng),與 MOSFET 技術(shù)相比,GaN FET 具有更高的理論效率,因為其開關(guān)損耗非常低。頻率的增加會要求 MCU 具備額外的功能,以便支持以足夠高的分辨率實現(xiàn)更高頻率開關(guān)所需的信號發(fā)送。
TI MOSFET 柵極驅(qū)動器能夠讓客戶以盡可能高的速度開關(guān) MOSFET,而 TI 低壓 GaN FET 則方便客戶快速比較和選擇機(jī)器人中每個位置的最佳 FET 類型。需要使用高性能 MOSFET 或 GaN FET 來實現(xiàn)驅(qū)動器,以提高電機(jī)效率。精密算法有助于減少電機(jī) FET 的開關(guān)需求和損耗。
人形機(jī)器人由電池供電,供電電壓通常為 48V,或者在 39V 至 54V 之間,具體取決于電池的電量狀態(tài)。使用的電壓取決于所設(shè)定的最小電池電量級別。前面提到,驅(qū)動器在 39V 時所需的最大功率為 4kW,可以看出,機(jī)器人驅(qū)動器需要在大約 102A 的電流下以最高效率工作來提供所需的功率,但同時要考慮到 0A 左右的精確測量,縮短 FET 的死區(qū)時間有利于 0A 左右電流測量的線性,使測量在低電流下更加精確。 在評估功率級要求和選擇適當(dāng)?shù)碾娏鳈z測器件以實現(xiàn)所需的性能水平時,電流檢測也是一個重要的設(shè)計考慮因素。TI 提供同相電流感測和低側(cè)電流感應(yīng)模擬選項,以及有關(guān)如何高效實現(xiàn)系統(tǒng)的設(shè)計指南。通常使用同相電流感測,以便始終能夠檢測電流并提高測量的精度。有三種不同的電流測量選項:

功能安全 在規(guī)劃未來的設(shè)計時,選擇能夠簡化功能安全認(rèn)證的器件非常重要。ISO13482、ISO10218 和 ISO 3691 - 4 標(biāo)準(zhǔn)為未來人形機(jī)器人的設(shè)計提供了預(yù)期方向。兩種 C 類標(biāo)準(zhǔn)(ISO10218 和 ISO3691 - 4)都參考了 ISO13849,規(guī)定系統(tǒng)必須達(dá)到性能等級 d(PLd)。但是,ISO3691 - 4 將架構(gòu)的確定權(quán)交給了實現(xiàn)者,而 ISO10218 則要求采用 CAT3 架構(gòu)。考慮到這些標(biāo)準(zhǔn)中的最糟糕情況,至少需要考慮人形機(jī)器人的 CAT3 PLD 安全注意事項。實現(xiàn) CAT3 系統(tǒng)時,必須采用圖 5 所示的安全架構(gòu)。


0次
版權(quán)與免責(zé)聲明
凡本網(wǎng)注明“出處:維庫電子市場網(wǎng)”的所有作品,版權(quán)均屬于維庫電子市場網(wǎng),轉(zhuǎn)載請必須注明維庫電子市場網(wǎng),http://hbjingang.com,違反者本網(wǎng)將追究相關(guān)法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點或證實其內(nèi)容的真實性,不承擔(dān)此類作品侵權(quán)行為的直接責(zé)任及連帶責(zé)任。其他媒體、網(wǎng)站或個人從本網(wǎng)轉(zhuǎn)載時,必須保留本網(wǎng)注明的作品出處,并自負(fù)版權(quán)等法律責(zé)任。
如涉及作品內(nèi)容、版權(quán)等問題,請在作品發(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。





電路圖分類
廣告

熱門電路圖
最新電路圖


