





淺析Bang-Bang控制在隨動系統(tǒng)中的應(yīng)用
出處:conwh 發(fā)布于:2011-09-01 20:55:47
隨動系統(tǒng)servo system,是一種反饋控制系統(tǒng)。在這種系統(tǒng)中,輸出量是機(jī)械位移、速度或者加速度。因此隨動系統(tǒng)這一術(shù)語,與位置或速度,或加速度控制系統(tǒng)是同義語。在隨動系統(tǒng)中,有一類,它的參考輸入不是時間的解析函數(shù),如何變化事先并不知道(隨著時間任意變化)。控制系統(tǒng)的任務(wù)是在各種情況下保證輸出以一定跟隨著參考輸入的變化而變化。bang-bang控制在系統(tǒng)偏差大,可加大系統(tǒng)的控制力度,提高系統(tǒng)的快速性,因此,bang-bang控制是隨動系統(tǒng)中不可缺少的控制方式。
bang-bang控制理論
bang-bang控制方面的研究始于20世紀(jì)50年代。在過去的20年中,魯棒控制一直是國際自控界的研究熱點。所謂"魯棒性",是指控制系統(tǒng)在一定(結(jié)構(gòu),大小)的參數(shù)攝動下,維持某些性能的特性。根據(jù)對性能的不同定義,可分為穩(wěn)定魯棒性和性能魯棒性。以閉環(huán)系統(tǒng)的魯棒性作為目標(biāo)設(shè)計得到的固定控制器稱為魯棒控制器。由于工作狀況變動、外部干擾以及建模誤差的緣故,實際工業(yè)過程的模型很難得到,而系統(tǒng)的各種故障也將導(dǎo)致模型的不確定性,因此可以說模型的不確定性在控制系統(tǒng)中廣泛存在。
bang-bang控制早由龐特里亞金提出。在移動目標(biāo)集的時間控制問題中,已知受控系統(tǒng)的狀態(tài)方程為x(t)=f(x(t),t)+b(x(t),t)u(t),假設(shè)f(x(t),t)和b(x(t),t)的元對x(t)和t是連續(xù)可微的。r維容許控制向量u(t)的約束條件為|uj(t)|≤1,j=1,2,…,r.從初態(tài)x(t0)=x0出發(fā),在某一末態(tài)時刻t>t0,首次達(dá)到移動目標(biāo)集g(x(t),t)=0.其中g(shù)是p維向量函數(shù),其各元對x(t)和t是連續(xù)可微的,同時性能指標(biāo)j[u(。)]=∫dt t-t0為[6,7].控制u(f)應(yīng)滿足。

且=f(x(t),t)+b(x(t),t)u(t) (2)



其中bj(x(t),t)是矩陣b的第j列向量,則 當(dāng)達(dá)極小,
當(dāng)達(dá)極小, 于是bang-bang控制u(t)
于是bang-bang控制u(t)

即時間控制的各個分量u(t)都是時間t的分段常值函數(shù),并在開關(guān)時間上由一個恒值到另一個恒值的跳變。
bang-bang控制在隨動系統(tǒng)中的具體應(yīng)用
現(xiàn)代魯棒控制是一個著重控制算法可靠性研究的控制器設(shè)計方法。其設(shè)計目標(biāo)是找到在實際環(huán)境中為保證安全要求控制系統(tǒng)必須滿足的要求。一旦設(shè)計好這個控制器,它的參數(shù)不能改變而且控制性能能夠保證。魯棒控制方法,是對時間域或頻率域來說,一般要假設(shè)過程動態(tài)特性的信息和它的變化范圍。一些算法不需要的過程模型,但需要一些離線辨識。一般魯棒控制系統(tǒng)的設(shè)計是以一些差的情況為基礎(chǔ),因此一般系統(tǒng)并不工作在狀態(tài)。常用的設(shè)計方法有:INA方法,同時鎮(zhèn)定,完整性控制器設(shè)計,魯棒控制,魯棒PID控制以及魯棒極點配置,魯棒觀測器等。
在隨動系統(tǒng)需要進(jìn)行調(diào)轉(zhuǎn)運動時,在某點需要以可能的加速度εm進(jìn)行回歸,此時誤差|em|≥emax當(dāng)?shù)竭_(dá)某點時,又需要以-εm進(jìn)行減速,當(dāng)速度減到零時,誤差也恰好為零,這就需要通過bang-bang控制來完成[2][3][4][5].如圖1的bang-bang控制閾值曲線。
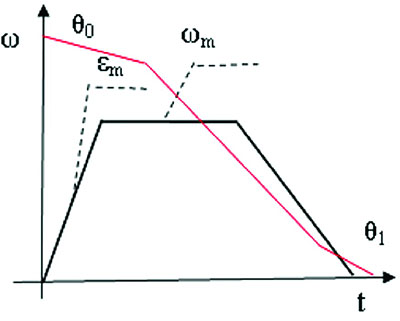
圖1 bang-bang控制閾值曲線
圖1中粗線表示速度變化曲線,細(xì)實線表示誤差角變化曲線。當(dāng)某一起點誤差較大時,控制系統(tǒng)以可能的加速度εm進(jìn)行加速,到達(dá)θ0點時以速度運行,當(dāng)?shù)竭_(dá)θ1點時以加速度-εm進(jìn)行制動。當(dāng)速度減到零時,其誤差恰好等于零。這是理想的快的調(diào)轉(zhuǎn)過程。要達(dá)到上述的要求就要正確判定轉(zhuǎn)換點θ1,通常可以認(rèn)為伺服電機(jī)的扭矩為恒定的,同時不考慮負(fù)載阻力矩的變化,系統(tǒng)可以看作為恒加速系統(tǒng),則可以計算出開始制動時刻的誤差角:
單片機(jī)收到電流反饋信號,經(jīng)過bang-bang控制等智能協(xié)調(diào)處理得出輸出控制量,根據(jù)輸出量的大小確定pwm的占空比。主控制芯片選用intel公司的87c1961mc芯片,其自有的p1、p2、p3、p4口完滿足控制需要。系統(tǒng)硬件簡圖如圖2.

圖2 系統(tǒng)硬件簡圖
軟件實現(xiàn)
上面分析轉(zhuǎn)換點和控制閾值都是理想的情況,實際上系統(tǒng)制動加速度εm的大小取決于電機(jī)的扭矩和負(fù)載的特性(阻力矩、轉(zhuǎn)動慣量等參數(shù))。控制程序內(nèi)采用bang-bang算法設(shè)定的加速度大小應(yīng)與負(fù)載實際加速度大小相對應(yīng),否則就會出現(xiàn)二次啟動或超調(diào)過大現(xiàn)象,影響到系統(tǒng)性能。當(dāng)控制程序內(nèi)的制動加速度εm的值設(shè)定較小時,計算出來的制動角與實際的相比就會偏大,就會出現(xiàn)制動過早現(xiàn)象,即制動已經(jīng)結(jié)束(速度已經(jīng)降到零),但系統(tǒng)還沒有到達(dá)預(yù)定位置,此時系統(tǒng)就會重新啟動,這就是二次啟動問題。這會造成調(diào)轉(zhuǎn)時間過長,影響到系統(tǒng)的快速性。同時,當(dāng)控制程序內(nèi)的制動加速度εm的值設(shè)定較大時,計算出來的制動角與實際的相比就會偏小,就會出現(xiàn)制動過晚現(xiàn)象,即系統(tǒng)已經(jīng)到達(dá)預(yù)定位置,但制動還沒有結(jié)束(速度還沒有降到零),此時系統(tǒng)出現(xiàn)超調(diào)。較小的超調(diào)是正常的,在負(fù)載上基本沒有反映;超調(diào)很大時,機(jī)械負(fù)載就會有反映,即出現(xiàn)回擺現(xiàn)象,同時也會造成調(diào)轉(zhuǎn)時間過長,影響到系統(tǒng)的快速性。出現(xiàn)二次啟動或超調(diào)過大現(xiàn)象時,只需改動控制程序中的加速度參數(shù)即可解決。
系統(tǒng)進(jìn)行調(diào)轉(zhuǎn)控制程序流程圖如圖3.

圖3 調(diào)轉(zhuǎn)控制程序流程圖
系統(tǒng)仿真
通過采樣出的點,能繪出系統(tǒng)在進(jìn)行不同階躍運動時的曲線。同時,對系統(tǒng)進(jìn)行仿真,能得出在正常制動、超調(diào)過大和二次啟動的曲線,與采樣出的曲線比較,相同運動狀態(tài)下曲線基本吻合。具體仿真曲線如圖4~6.

圖4 二次啟動簡圖 圖5 回擺現(xiàn)象簡圖 圖 6 正常制動簡圖
結(jié)語
仿真結(jié)果說明,bang-bang控制在隨動系統(tǒng)調(diào)轉(zhuǎn)控制能很好滿足系統(tǒng)快速性的要求,達(dá)到階躍過程化,并且結(jié)合其它控制方法能提高系統(tǒng)自適應(yīng)能力和控制,有很好的推廣價值。
版權(quán)與免責(zé)聲明
凡本網(wǎng)注明“出處:維庫電子市場網(wǎng)”的所有作品,版權(quán)均屬于維庫電子市場網(wǎng),轉(zhuǎn)載請必須注明維庫電子市場網(wǎng),http://hbjingang.com,違反者本網(wǎng)將追究相關(guān)法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點或證實其內(nèi)容的真實性,不承擔(dān)此類作品侵權(quán)行為的直接責(zé)任及連帶責(zé)任。其他媒體、網(wǎng)站或個人從本網(wǎng)轉(zhuǎn)載時,必須保留本網(wǎng)注明的作品出處,并自負(fù)版權(quán)等法律責(zé)任。
如涉及作品內(nèi)容、版權(quán)等問題,請在作品發(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。
- 什么是氫氧燃料電池,氫氧燃料電池的知識介紹2025/8/29 16:58:56
- SQL核心知識點總結(jié)2025/8/11 16:51:36
- 等電位端子箱是什么_等電位端子箱的作用2025/8/1 11:36:41
- 基于PID控制和重復(fù)控制的復(fù)合控制策略2025/7/29 16:58:24
- 什么是樹莓派?一文快速了解樹莓派基礎(chǔ)知識2025/6/18 16:30:52



