





基于MEMS壓力傳感器的個人導航儀
出處:意法半導體 發(fā)布于:2011-09-04 09:56:37
壓力傳感器 是指將壓力轉換為電信號輸出的傳感器。壓力傳感器一般由彈性敏感元件和位移敏感元件(或應變計)組成。彈性敏感元件的作用是使被測壓力作用于某個面積上并轉換為位移或應變,然后由位移敏感元件或應變計轉換為與壓力成一定關系的電信號。有時把這兩種元件的功能集于一體。壓力傳感器廣泛應用于各種工業(yè)自控環(huán)境,涉及水利水電、鐵路交通、智能建筑、生產自控、航空航天、、石化、油井、電力、船舶、機床、管道等眾多行業(yè)。
力學傳感器的種類繁多,但常用的壓力傳感器有電阻應變片壓力傳感器、半導體應變片壓力傳感器、壓阻式壓力傳感器、電感式壓力傳感器、電容式壓力傳感器、諧振式壓力傳感器及電容式加速度傳感器等。應用為廣泛的是壓阻式壓力傳感器,它具有極低的價格和較高的以及較好的線性特性。
國內從事硅電容壓力傳感器的研究可以說是剛剛起步。盡管國內已經(jīng)有單位研制出了硅電容傳感器,它的和靜壓特性已接近富士公司產品的平均水平,但在長期穩(wěn)定性方面,差距較大。同時,國內的電容傳感器在高差壓和微差壓規(guī)格的開發(fā)上仍有較大差距。國外壓阻式傳感器可以達到0.075%,而國內研制的壓阻式傳感器的只有0.1%.在長期穩(wěn)定性能上,國產傳感器和進口傳感器的差距更為明顯。國產產品長期穩(wěn)定性的指標為0.1%/年,比國外產品至少高2倍。另外,國產產品的溫度特性差。與國外產品相比,溫度漂移比國外產品的典型值大50%~100%.此外,國產產品的規(guī)格品種不夠全,在微差壓和高差壓、高靜壓規(guī)格方面沒有成熟的產品,不能滿足某些工藝的特殊要求。
壓力傳感器的國產化問題的關鍵主要是如何提高傳感器的長期穩(wěn)定性。傳感器的長期穩(wěn)定性和傳感器的材料選擇、結構設計、加工工藝密切相關。我國在MEMS加工工藝上還處于相對落后階段,提高工藝水平無疑是提高傳感器性能的長遠之計。
目前,國內相關高校和科研院所對壓阻式和電容式MEMS傳感器進行了大量的研究,在理論和工藝水平上都取得了一些成果。就當前工藝水平而言,如果能夠實現(xiàn)某種形式的補償或者在線的自標定方法,則有可能在短期內提高傳感器的長期穩(wěn)定性,使國產傳感器在穩(wěn)定性指標上滿足石化行業(yè)需求。
近幾年,隨著MEMS壓力傳感器的性能不斷提高,成本和尺寸不斷降低,消費電子廠商開始使用壓力傳感器與慣性傳感器和地磁傳感器模組實現(xiàn)航位推測和導航功能。
隨著MEMS傳感器的設計和制造工藝的進步,MEMS壓力傳感器被廣泛用于醫(yī)療、汽車和消費電子等應用領域。例如,壓力傳感器可用于監(jiān)測血壓,汽車廠商利用氣壓傳感器優(yōu)化發(fā)動機能效,提醒駕駛員輪胎氣壓不足。
本文論述如何在個人導航儀內利用MEMS壓力傳感器輔助GPS接收器測量海拔高度。
1.大氣壓與海拔高度的關系
在個人導航儀中,MEMS壓力傳感器充當氣壓計用于測量海拔高度變化。因此,我們必須了解不同高度的大氣壓。
下面是大氣壓測量單位:
psi – 磅/平方英寸
cm/Hg – 水銀柱高(厘米)
cm/Hg – 水銀柱高(英寸)
Pa – 帕,國際制壓力單位(SI) ,1Pa = 1 N/m2
bar – 巴,氣壓單位,1 bar = 105Pa
mbar – 毫巴,1mbar = 10-3 bar
我們居住在地球大氣層的底層,大氣壓隨著海拔高度上升而降低。我們將在59 ℉時的29.92 in/Hg海平面氣壓規(guī)定為標準大氣壓,這個平均值不受時間影響,而受到測量點的地理位置、氣溫和氣流的影響。
因此,上述壓力單位之間的換算關系是:
1 個標準大氣壓= 14.7 psi = 76 cm/Hg = 29.92 in/Hg = 1.01325 bar = 1013.25 mbar
可以用下面的表達式表示大氣壓與海拔高度之間關系[1]:
其中:
P0 是標準大氣壓,等于1013.25 mbar;
Altitude是以米為單位的海拔高度。
P是在某一高度的以mbar為單位的氣壓
圖1根據(jù)上面的公式描述了大氣壓變化與海拔高度的關系。
如圖1所示,當高度從海平面上升到海拔11,000米高時,大氣壓從1013.25 mbar降到230 mbar.我們從圖中不難看出,當高度低于1,500米時,大氣壓幾乎呈線性降低,每100米大約降低11.2 mbar,即每10米大約降低1.1 mbar.為了取得更的高度測量數(shù)據(jù),可以在目標應用中構建一個大氣壓高度查詢表,根據(jù)壓力傳感器的測量結果,確定對應的海拔高度。
如果使用全量程為300 mbar到1100 mbar的MEMS壓力傳感器,測量高度可達海拔9,165米到海平面以下698米。
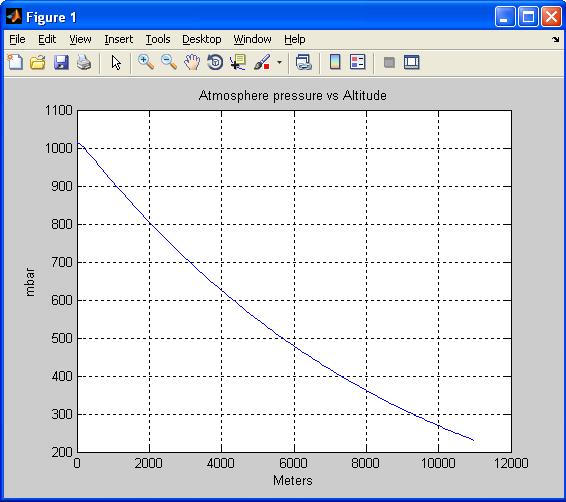
圖1: 大氣壓與海拔高度的關系
2. 利用MEMS傳感器確定樓層
0.1 mbar rms的測量分辨率使MEMS壓力傳感器能夠發(fā)現(xiàn)在1米以內高度變化。因此,在高層建筑內,可以使用壓力傳感器發(fā)現(xiàn)樓層變化。
圖2所示是在意法半導體的意大利Castelletto寫字樓內采集到的壓力傳感器數(shù)據(jù)。采樣速率是7Hz,數(shù)據(jù)采集時間總計大約23分鐘。從圖中我們可以清晰地看到大氣壓在不同樓層的變化。大氣壓在地下室。隨著樓層升高,大氣壓逐漸降低。
圖3所示是意法半導體的一個MEMS壓力傳感器,這是一個采用3 x 5 x 1mm LGA-8封裝的數(shù)字輸出壓力傳感器,內置I2C/SPI接口和16位數(shù)據(jù)輸出。量程是300 mbar到1100 mbar,分辨率為0.1mbar.該芯片還內置溫度傳感器。芯片內部控制寄存器可以指示測量結果是高于還是低于壓力極限預設值。
壓力傳感器的測量會受到氣流和天氣條件的影響。為了取得、可靠的樓層測量結果,需要為壓力傳感器開發(fā)校準和濾波算法。

圖2: 從意法半導體傳感器原始數(shù)據(jù)取得的樓層檢測結果
圖3: 意法半導體的MEMS壓力傳感器
3. 在個人導航儀中使用MEMS壓力傳感器
個人導航系統(tǒng)(PNS)與個人航位推測(PDR)系統(tǒng)相似。從基本原理看,當無法獲得GPS衛(wèi)星信號時,PNS或PDR可以在智能手機的電子地圖上繼續(xù)提供方位和前進信息,引導用戶到達興趣點,獲得位置關聯(lián)服務(LBS)。
在當前市面上銷售的智能手機中,大多數(shù)都內置了GPS接收器和低成本的MEMS運動傳感器,例如,加速度計、陀螺儀和/或磁力計。在沒有GPS衛(wèi)星信號的建筑物內或GPS信號很弱的高樓林立的大都市內,個人導航或航位推測對于導航變得非常重要。鑒于GPS接收器在戶內戶外測量高度都不夠,在智能手機內集成壓力傳感器可以輔助GPS測量高度。
前進信息可以來自磁力計或陀螺儀或兩者的模組。PNS是利用慣性導航原理(INS)對加速度計的測量值進行雙重積分求解決方位信息,而PDR是計步器和步長估算器根據(jù)典型計步器原理計算加速度計提供的測量數(shù)據(jù)而獲得的方位信息。在一定時間內獲得前進方向和行進路程的信息后,導航系統(tǒng)在智能手機的電子地圖上更新行人在戶內的方位。
3.1 PNS或PDR結構示意圖
圖4所示是PNS或PDR的結構示意圖。
從傳感器角度看,該系統(tǒng)包括一個3軸加速度計、一個3軸陀螺儀、一個3軸磁力計和一個壓力傳感器。此外,在這個示意圖內還有一個GPS接收器和一個主處理器。主處理器用于采集傳感器數(shù)據(jù),運行航位推測算法和卡爾曼濾波算法。
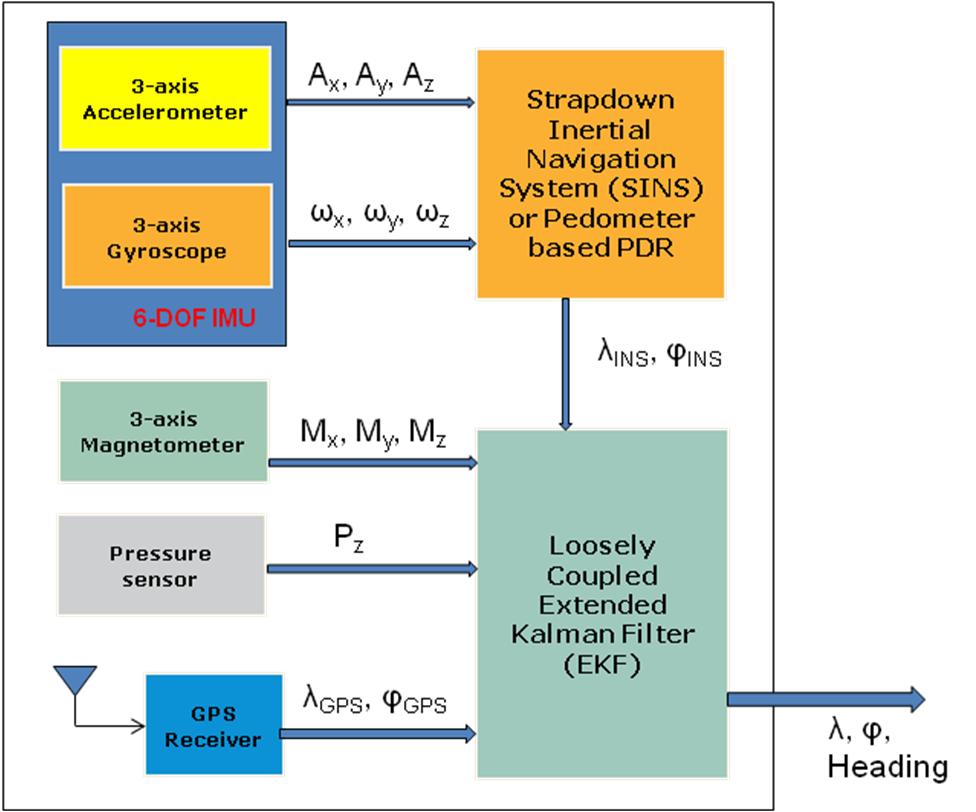
圖4: PNS或PDR結構示意圖
圖4中每個組件的優(yōu)缺點歸納如下:
GPS接收器:
優(yōu)點:GPS可以提供進入建筑物前的初始方位;檢索地球偏轉角信息,根據(jù)地理前進方向修正磁力計前進方向;當GPS信號增強時校準計數(shù)器步長;分別向慣性導航系統(tǒng)的松耦合和緊耦合卡爾曼濾波算法提供有界的方位信息(經(jīng)緯度)輸出和偽距原始測量輸出。
缺點:當行人保持靜止時,GPS無法確定前進方向;無法檢測高度(海拔高度)的細微變化。
加速度計:
優(yōu)點:在靜態(tài)或慢速運動狀態(tài)下可用于傾斜度修正型數(shù)字羅盤;在線性加速度狀態(tài)下可用于計步器的檢測功能;用于檢測步行人當前的狀態(tài)是靜止還是運動。
缺點:當智能手機旋轉時,無法從地球重力組分中區(qū)別真正的線性加速度;對震動和振蕩過于敏感
陀螺儀:
優(yōu)點:能夠向慣性導航系統(tǒng)連續(xù)提供旋轉矩陣;當磁力計受到干擾時,輔助數(shù)字羅盤計算前進方向信息
缺點:長時間的零偏漂移導致無限的INS定位錯誤。
磁力計:
優(yōu)點:能夠根據(jù)地磁北極計算的前進方向;能夠用于校準陀螺儀的靈敏度。
缺點:容易受到環(huán)境磁場干擾
壓力傳感器:
優(yōu)點:在室內導航應用中可區(qū)分樓層;當GPS衛(wèi)星信號較弱時,可輔助GPS計算高度,提高定位度;
缺點:容易受到氣流和天氣狀況的影響。
3.2 PNS或PDR的實現(xiàn)方式
有兩種方法可以在智能手機上實現(xiàn)PNS或PDR導航。種方法是利用捷聯(lián)式慣性導航系統(tǒng)(SINS)實現(xiàn)PNS;第二種方法是利用計步器方法實現(xiàn)PDR.這兩種方法都有各自的優(yōu)點和缺點。
捷聯(lián)慣導系統(tǒng)是基于一個3軸加速度計和一個3軸陀螺儀的6自由度(DOF)慣性測量單元。捷聯(lián)慣導系統(tǒng)被成功用于外殼剛性很強的設備內,例如,慣性測量單元被性安裝在汽車和導彈內。該系統(tǒng)在短時間內的定位相對較高。因為低成本MEMS運動傳感器的零偏漂移問題,當沒有GPS衛(wèi)星信號時,經(jīng)過積分和二重積分運算后,定位誤差會隨時間推移而變大。此外,行人通常把智能手機放在衣袋或掛在腰帶上,他們隨時都會從衣袋里或腰帶上取出手機查看當前所在方位。這就是說,智能手機與用戶身體的相對位置不固定。
不過,SINS/GPS集成化PNS系統(tǒng)的優(yōu)點是定位與用戶無關,這就是說,所有用戶無需給智能手機建模或訓練智能手機,以適應不同類型的行人的動作,例如,步行、跑步和上下樓梯等。
計步器/GPS集成化PDR系統(tǒng)的優(yōu)點是定位主要取決于加速度計計步和GPS步長估算,定位誤差始終是有限的[2].
PDR的步是使用加速度計檢測腳步[3].這個過程的基本原理是,智能手機在行人的腰帶后部無論如何放置,都能自動發(fā)現(xiàn)垂直主軸;然后,將加速度測量數(shù)據(jù)與個參考閾值對比,隨后,參考閾值將根據(jù)不同的運動類型自動更新。因此,加速度計可以準確計算行人步行、跑步和上下樓梯時的步數(shù)。
第二步是當GPS信號很強時校準步長。智能手機計算行人的平均步長的方法是,用從GPS開始測量起經(jīng)過的距離除以上面的計步器算法得出的步數(shù)。步行人的所有的運動類型,例如,慢走、快走、慢跑、快跑、上下樓梯等,都需要執(zhí)行步長校準步驟。不同的行人有不同的運動方式。因此,PDR與用戶有關,所有的步行人都需要一個自動校準或自我訓練的步長估算算法。
第三步是整合加速度計、陀螺儀、磁力計和GPS接收器的數(shù)據(jù)求解的前進信息。在估算完步長后,求解航位推測應用的另一個關鍵參數(shù):以地球北極為參考點的前進方向。在一個無磁場干擾的環(huán)境內,加速度計和磁力計測量結果產生的傾斜度修正的數(shù)字羅盤能夠提供以地球北極為參照點的的前進方向。
在進入建筑物前,GPS定位信息能夠根據(jù)位置檢索傾斜角,然后,把羅盤提供的前進方向數(shù)據(jù)轉化成地理前進方向信息。如果周圍環(huán)境沒有干擾磁場,可以利用磁力計的測量數(shù)值提取前進方向信息。如果發(fā)現(xiàn)干擾磁場,陀螺儀將接替磁力計的工作,在上無干擾的羅盤前進信號輸出基礎上提供連續(xù)的前進信息輸出。
一旦發(fā)現(xiàn)外界磁場干擾消失,陀螺儀將立即停止運行,羅盤將接替陀螺儀恢復運轉。這個過程被稱之為陀螺儀輔助數(shù)字羅盤。當智能手機是靜止狀態(tài)時,加速度計就會讓陀螺儀定期更新零角速率電平以備將來使用
第四步是從壓力傳感器和GPS接收器獲得的高度信息。當行人在購物中心乘坐電梯或登樓梯時,壓力傳感器會更新數(shù)字地圖,顯示行人當前所在樓層。壓力傳感器還能利用卡爾曼濾波器濾除加速度計的Z軸漂移。
第五步是開發(fā)卡爾曼濾波算法,合并10-D傳感器模組數(shù)據(jù)與GPS數(shù)據(jù)。所有的GPS接收器都有1個PPS (脈沖/秒)輸出信號,使GPS與傳感器的數(shù)據(jù)傳輸同步,傳感器的采樣速率可以更快,例如50Hz或100Hz.當能夠收到GPS衛(wèi)星信號時,卡爾曼濾波器將使用GPS輸出數(shù)據(jù)計算導航信息;相反,當GPS衛(wèi)星信號被屏蔽時,則使用航位推測算法輸出的數(shù)據(jù)。當GPS信號恢復時,該濾波器還能估算需要修正的傳感器誤差。
一步是在智能手機上測試PDR的性能。對于消費電子產品,5%的行進距離誤差通常是可以接受的。例如,當一個人在室內走過100米的距離時,定位誤差應該在5米范圍內。
4. 結論
MEMS技術和制程的發(fā)展進步產生了低成本、高性能的MEMS加速度計、陀螺儀和壓力傳感器。隨著尺寸越來越小,功耗越來越低,這些產品開始在智能手機等手持產品上演繹令人震撼的新功能。
在無人駕駛飛行器(UAV)導航系統(tǒng)和室內PDR應用方面,MEMS壓力傳感器正在引起業(yè)界的強烈關注。隨著先進濾波算法研發(fā)的深入,在室內實現(xiàn)5%的距離誤差是切合實際的。
5. 縮略語
DOF –自由度
GPS –定位系統(tǒng)
IMU –慣性測量單元
INS –慣性導航系統(tǒng)
LBS –位置關聯(lián)服務
MEMS–微機電系統(tǒng)
PDR –個人航位推測
PNS –個人導航系統(tǒng)
PPS –脈沖/秒
SINS–捷聯(lián)慣性導航系統(tǒng)
UAV –無人駕駛飛行器
LGA –格柵陣列封裝
版權與免責聲明
凡本網(wǎng)注明“出處:維庫電子市場網(wǎng)”的所有作品,版權均屬于維庫電子市場網(wǎng),轉載請必須注明維庫電子市場網(wǎng),http://hbjingang.com,違反者本網(wǎng)將追究相關法律責任。
本網(wǎng)轉載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點或證實其內容的真實性,不承擔此類作品侵權行為的直接責任及連帶責任。其他媒體、網(wǎng)站或個人從本網(wǎng)轉載時,必須保留本網(wǎng)注明的作品出處,并自負版權等法律責任。
如涉及作品內容、版權等問題,請在作品發(fā)表之日起一周內與本網(wǎng)聯(lián)系,否則視為放棄相關權利。
- ARM技術架構與應用開發(fā)實踐指南2026/1/6 10:40:19
- 嵌入式實時操作系統(tǒng)(RTOS)選型與移植技術指南2025/12/31 10:42:31
- 工業(yè)嵌入式系統(tǒng):通信接口技術選型與抗干擾設計實踐2025/12/15 14:36:53
- 深入解析嵌入式 OPENAMP 框架:開啟異核通信新時代2025/7/22 16:27:29
- 一文快速了解OPENWRT基礎知識2025/7/14 16:59:04



