





通過電容式傳感測量加速度
出處:維庫電子市場網 發(fā)布于:2024-11-29 16:55:02 | 528 次閱讀
加速度計可用于不同的應用領域。例如,在汽車應用中,加速度計用于激活安全氣囊系統(tǒng)。相機使用加速度計對照片進行主動穩(wěn)定。計算機硬盤驅動器還依靠加速度計來檢測可能損壞設備讀/寫頭的外部沖擊。在這種情況下,當發(fā)生外部沖擊時,加速度計會暫停驅動器運行。這些只是加速度計的幾個應用。
這些設備的用途實際上有無限的可能性。微加工技術的巨大進步使當今小型、低成本的微機械加速度計成為可能。事實上,小尺寸和低成本是使我們能夠將這些器件應用于如此廣泛的應用的兩個主要因素。
在本文中,我們將了解測量加速度的物理原理。我們將了解質量-彈簧-阻尼器(也稱為質量-阻尼器-彈簧)結構如何將加速度轉換為位移量,以及如何應用電容傳感方法將此位移轉換為與施加的加速度成正比的電信號。
使用質量彈簧阻尼器測量加速度
如圖 1 所示的質量-彈簧-阻尼器結構可用于測量加速度。
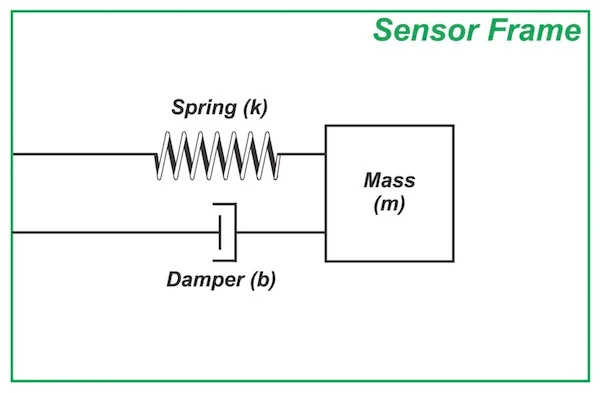 圖 1. 質量-彈簧-阻尼器結構
圖 1. 質量-彈簧-阻尼器結構
已知質量,通常稱為驗證質量(或測試質量),通過彈簧連接到傳感器框架。
盡管阻尼器是該系統(tǒng)的重要組成部分,但我們將將其擱置到本系列的下一篇文章,因為它對于 EE 來說可能有點神秘,并且可能需要幾段來介紹阻尼器的基本概念。
讓我們看看圖 1 中所示的結構如何檢測加速度。 當傳感器框架因外力而加速時,由于慣性,可靠質量往往會“向后移動”。這會改變質量塊相對于傳感器框架的相對位置,如下圖所示。
圖 2(a) 顯示了在沒有外力時其靜止位置的可靠質量。如圖 2(b) 所示,當對框架施加外力時,框架向右加速。質量體最初傾向于保持靜止,這會改變質量體相對于框架的相對位置 (d2< d1).
傳感器的非慣性(即加速)坐標系中的觀察者觀察到,驗證質量塊被移動到其靜止位置的左側。由于驗證質量位移,彈簧被壓縮,并施加與驗證質量上的位移成正比的力。彈簧施加的力將驗證質量向右推,并使其沿外力的方向加速。
如果為系統(tǒng)的不同參數選擇了適當的值,則驗證質量位移將與框架加速度值成正比(在系統(tǒng)的瞬態(tài)響應消失后)。
總而言之,質量-彈簧-阻尼器結構將傳感器框架的加速度轉換為驗證質量位移。剩下的問題是,我們如何測量這種位移?
測量 Proof 質量位移:電容式傳感方法
驗證質量位移可以通過多種方式進行測量。一種常見的方法是圖 3 中描述的電容式傳感方法。
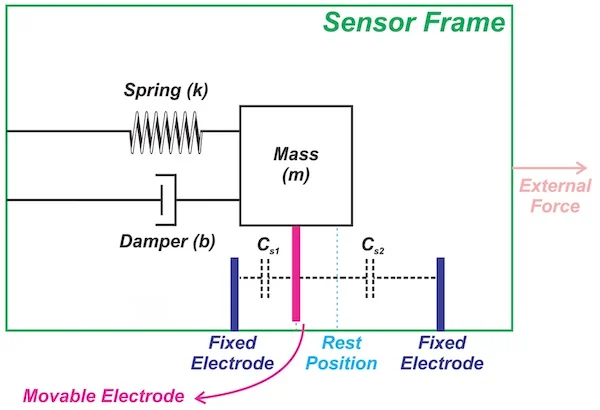 圖 3
圖 3
有兩個電極固定在傳感器框架上,還有一個連接到驗證質量塊的可移動電極。這會產生兩個電容器 CS1 系列和 CS2 系列,如圖 3 所示。
當質量塊沿一個方向移動時,可移動電極和一個固定電極之間的電容增加,而另一個電容器的電容減小。這就是為什么我們只需要測量感應電容器的變化來檢測與輸入加速度成正比的驗證質量位移。
使用同步解調的加速度計信號調節(jié)
為了準確測量檢測電容的變化,我們可以應用同步解調技術。圖 4 顯示了 Analog Devices 的 ADXL 系列加速度計中采用的信號調理的簡化版本。
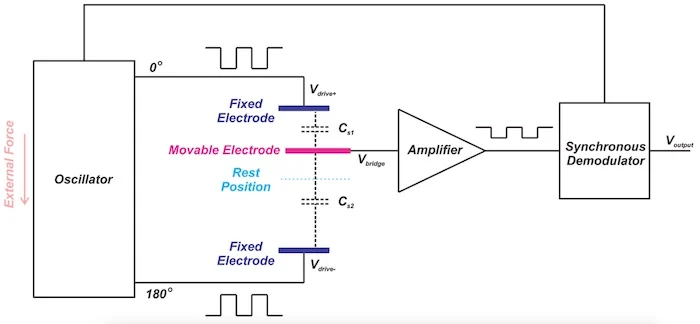 圖 4. 圖片(改編)由 Analog Devices 提供
圖 4. 圖片(改編)由 Analog Devices 提供
在這種情況下,1 MHz 方波用作感應電容器 C 的交流激勵S1 系列和 CS2 系列.施加到固定電極上的方波具有相同的振幅,但彼此相差 180°。當可移動電極處于靜止位置時,放大器輸入端的電壓為零伏。
當可移動電極靠近其中一個固定電極時,來自該電極的激勵電壓的較大部分出現在放大器輸入 V 處橋,這意味著放大器輸入端出現的方波與較近電極的激勵電壓同相。
例如,在圖 4 中,放大輸出是一個與 V 同相的方波驅動+因為 CS1 系列大于 CS2 系列.
V 的振幅橋是 PROOF 質量位移的函數;但是,我們還需要知道 V 的相位關系橋相對于 V驅動+和 V駕駛-確定可靠質量塊的位移方向。
同步解調器基本上將放大器輸出乘以激勵電壓 (V驅動+或 V駕駛-) 將放大器輸出端的方波轉換為直流電壓,從而顯示位移量及其方向。
要了解同步解調如何實現這一目標,請參閱我關于 LVDT 解調技術的文章:LVDT 解調:整流器型與同步解調。
為什么我們不使用單個傳感電容器?
圖 3 中描述的電容式傳感具有差分性質:當 CS1 系列增加,CS2 系列減少,反之亦然。
也可以采用單端電容感應,其中省略了一個固定電極,因此只有一個可變電容器。在這種情況下,我們可以對系統(tǒng)進行建模,如圖 5 所示。
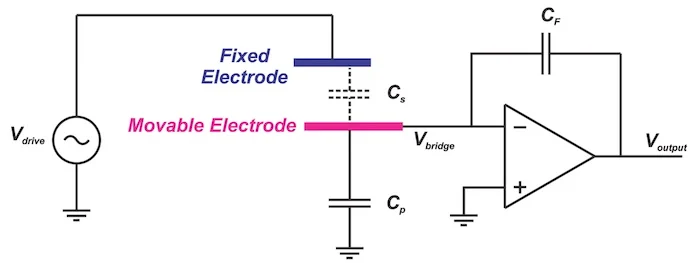 圖 5
圖 5
這個單端版本似乎是一個更簡單的解決方案。那么,為什么我們不使用單個傳感電容器呢?
單傳感電容器結構:非線性輸出
讓我們更仔細地研究一下這個電路。
在上圖中,Cp模擬從可移動電極到地的總寄生電容。理想情況下,V橋位于虛擬 ground 上,我們可以忽略 Cp因為它的一側是 ground,另一側是 virtual ground。
因此,輸出可以簡單地獲得為:
\[ V_{輸出} = -\frac{C_s}{C_F} V_{驅動器}\]
方程 1
請注意,偏置電流路徑未顯示在圖 5 中。使用電容器基本方程,我們可以用驗證質量位移來表示輸出。
對于電容器 C,我們有:
\[ C = \epsilon \frac{A}u0qukey\]
方程 2
其中 ε 是介電常數,A 是平行板面積,d 是兩個導電板之間的距離。為簡單起見,假設兩個電容器 Cs和 CF具有相同的 ε 和 A。
然后,方程 1 可以簡化為:
\[ V_{輸出} = -\frac{d_F}{d_s} V_{驅動器}\]
其中 dF和 ds表示 C 的電極之間的距離F和 Cs分別。ds可以表示為初始距離 d 之和0和位移值 Δd。
從那里我們可以獲得:
\[ V_{輸出} = -\frac{d_F}{d_0 + \Delta d} V_{驅動器}\]
如您所見,位移項 (Δd) 位于輸出方程的分母中。因此,輸出是驗證質量位移 Δd 的非線性函數。
差分結構:線性輸出
我們來看看圖 4 中描述的差分電容感應的傳遞函數。
您可以驗證,通過差分電容感應,V橋由下式給出:
\[ V_{bridge} = \frac{C_{s1} V_{drive+} + C_{s2} V_{drive-}}{C_{s1} + C_{s2}} \]
應用公式 2 并假設兩個電容 CS1 系列和 CS2 系列具有相同的 ε 和 A 值,我們得到:
\[ V_{bridge} = \frac{d_{s2} V_{drive+} + s_{s1} V_{drive-}}{d_{s1} + d_{s2}} \]
方程 3
其中 dS1 系列和 dS2 系列表示 C 的電極之間的距離S1 系列和 CS2 系列分別。當 dS1 系列增加,dS2 系列減少相同的量,反之亦然。
假設:
\[ d_{s1} = d_0 - \Delta d \]
\[ d_{s2} = d_0 + \Delta d \]
\[ V_{驅動器+} = - V_{驅動器-} \]
公式 3 簡化為:
\[ V_{bridge} = \frac{\Delta d}{d_0} V_{drive+} \]
如您所見,在差分結構中,輸出電壓是驗證質量位移 Δd 的線性函數。請注意,雖然我們可以使用軟件來消除傳感器線性誤差,但線性響應是可取的,因為它可以提高測量精度并促進系統(tǒng)校準。
這些設備的用途實際上有無限的可能性。微加工技術的巨大進步使當今小型、低成本的微機械加速度計成為可能。事實上,小尺寸和低成本是使我們能夠將這些器件應用于如此廣泛的應用的兩個主要因素。
在本文中,我們將了解測量加速度的物理原理。我們將了解質量-彈簧-阻尼器(也稱為質量-阻尼器-彈簧)結構如何將加速度轉換為位移量,以及如何應用電容傳感方法將此位移轉換為與施加的加速度成正比的電信號。
使用質量彈簧阻尼器測量加速度
如圖 1 所示的質量-彈簧-阻尼器結構可用于測量加速度。
圖 1. 質量-彈簧-阻尼器結構已知質量,通常稱為驗證質量(或測試質量),通過彈簧連接到傳感器框架。
盡管阻尼器是該系統(tǒng)的重要組成部分,但我們將將其擱置到本系列的下一篇文章,因為它對于 EE 來說可能有點神秘,并且可能需要幾段來介紹阻尼器的基本概念。
讓我們看看圖 1 中所示的結構如何檢測加速度。 當傳感器框架因外力而加速時,由于慣性,可靠質量往往會“向后移動”。這會改變質量塊相對于傳感器框架的相對位置,如下圖所示。
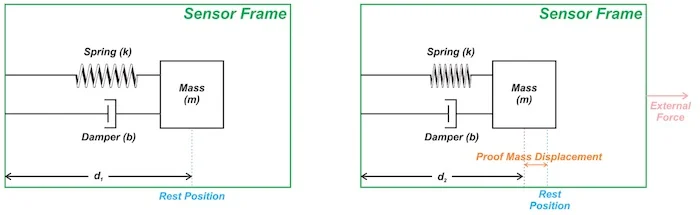
圖 2(a) 顯示了在沒有外力時其靜止位置的可靠質量。如圖 2(b) 所示,當對框架施加外力時,框架向右加速。質量體最初傾向于保持靜止,這會改變質量體相對于框架的相對位置 (d2< d1).
傳感器的非慣性(即加速)坐標系中的觀察者觀察到,驗證質量塊被移動到其靜止位置的左側。由于驗證質量位移,彈簧被壓縮,并施加與驗證質量上的位移成正比的力。彈簧施加的力將驗證質量向右推,并使其沿外力的方向加速。
如果為系統(tǒng)的不同參數選擇了適當的值,則驗證質量位移將與框架加速度值成正比(在系統(tǒng)的瞬態(tài)響應消失后)。
總而言之,質量-彈簧-阻尼器結構將傳感器框架的加速度轉換為驗證質量位移。剩下的問題是,我們如何測量這種位移?
測量 Proof 質量位移:電容式傳感方法
驗證質量位移可以通過多種方式進行測量。一種常見的方法是圖 3 中描述的電容式傳感方法。
圖 3有兩個電極固定在傳感器框架上,還有一個連接到驗證質量塊的可移動電極。這會產生兩個電容器 CS1 系列和 CS2 系列,如圖 3 所示。
當質量塊沿一個方向移動時,可移動電極和一個固定電極之間的電容增加,而另一個電容器的電容減小。這就是為什么我們只需要測量感應電容器的變化來檢測與輸入加速度成正比的驗證質量位移。
使用同步解調的加速度計信號調節(jié)
為了準確測量檢測電容的變化,我們可以應用同步解調技術。圖 4 顯示了 Analog Devices 的 ADXL 系列加速度計中采用的信號調理的簡化版本。
圖 4. 圖片(改編)由 Analog Devices 提供在這種情況下,1 MHz 方波用作感應電容器 C 的交流激勵S1 系列和 CS2 系列.施加到固定電極上的方波具有相同的振幅,但彼此相差 180°。當可移動電極處于靜止位置時,放大器輸入端的電壓為零伏。
當可移動電極靠近其中一個固定電極時,來自該電極的激勵電壓的較大部分出現在放大器輸入 V 處橋,這意味著放大器輸入端出現的方波與較近電極的激勵電壓同相。
例如,在圖 4 中,放大輸出是一個與 V 同相的方波驅動+因為 CS1 系列大于 CS2 系列.
V 的振幅橋是 PROOF 質量位移的函數;但是,我們還需要知道 V 的相位關系橋相對于 V驅動+和 V駕駛-確定可靠質量塊的位移方向。
同步解調器基本上將放大器輸出乘以激勵電壓 (V驅動+或 V駕駛-) 將放大器輸出端的方波轉換為直流電壓,從而顯示位移量及其方向。
要了解同步解調如何實現這一目標,請參閱我關于 LVDT 解調技術的文章:LVDT 解調:整流器型與同步解調。
為什么我們不使用單個傳感電容器?
圖 3 中描述的電容式傳感具有差分性質:當 CS1 系列增加,CS2 系列減少,反之亦然。
也可以采用單端電容感應,其中省略了一個固定電極,因此只有一個可變電容器。在這種情況下,我們可以對系統(tǒng)進行建模,如圖 5 所示。
圖 5這個單端版本似乎是一個更簡單的解決方案。那么,為什么我們不使用單個傳感電容器呢?
單傳感電容器結構:非線性輸出
讓我們更仔細地研究一下這個電路。
在上圖中,Cp模擬從可移動電極到地的總寄生電容。理想情況下,V橋位于虛擬 ground 上,我們可以忽略 Cp因為它的一側是 ground,另一側是 virtual ground。
因此,輸出可以簡單地獲得為:
\[ V_{輸出} = -\frac{C_s}{C_F} V_{驅動器}\]
方程 1
請注意,偏置電流路徑未顯示在圖 5 中。使用電容器基本方程,我們可以用驗證質量位移來表示輸出。
對于電容器 C,我們有:
\[ C = \epsilon \frac{A}u0qukey\]
方程 2
其中 ε 是介電常數,A 是平行板面積,d 是兩個導電板之間的距離。為簡單起見,假設兩個電容器 Cs和 CF具有相同的 ε 和 A。
然后,方程 1 可以簡化為:
\[ V_{輸出} = -\frac{d_F}{d_s} V_{驅動器}\]
其中 dF和 ds表示 C 的電極之間的距離F和 Cs分別。ds可以表示為初始距離 d 之和0和位移值 Δd。
從那里我們可以獲得:
\[ V_{輸出} = -\frac{d_F}{d_0 + \Delta d} V_{驅動器}\]
如您所見,位移項 (Δd) 位于輸出方程的分母中。因此,輸出是驗證質量位移 Δd 的非線性函數。
差分結構:線性輸出
我們來看看圖 4 中描述的差分電容感應的傳遞函數。
您可以驗證,通過差分電容感應,V橋由下式給出:
\[ V_{bridge} = \frac{C_{s1} V_{drive+} + C_{s2} V_{drive-}}{C_{s1} + C_{s2}} \]
應用公式 2 并假設兩個電容 CS1 系列和 CS2 系列具有相同的 ε 和 A 值,我們得到:
\[ V_{bridge} = \frac{d_{s2} V_{drive+} + s_{s1} V_{drive-}}{d_{s1} + d_{s2}} \]
方程 3
其中 dS1 系列和 dS2 系列表示 C 的電極之間的距離S1 系列和 CS2 系列分別。當 dS1 系列增加,dS2 系列減少相同的量,反之亦然。
假設:
\[ d_{s1} = d_0 - \Delta d \]
\[ d_{s2} = d_0 + \Delta d \]
\[ V_{驅動器+} = - V_{驅動器-} \]
公式 3 簡化為:
\[ V_{bridge} = \frac{\Delta d}{d_0} V_{drive+} \]
如您所見,在差分結構中,輸出電壓是驗證質量位移 Δd 的線性函數。請注意,雖然我們可以使用軟件來消除傳感器線性誤差,但線性響應是可取的,因為它可以提高測量精度并促進系統(tǒng)校準。
0次
版權與免責聲明
凡本網注明“出處:維庫電子市場網”的所有作品,版權均屬于維庫電子市場網,轉載請必須注明維庫電子市場網,http://hbjingang.com,違反者本網將追究相關法律責任。
本網轉載并注明自其它出處的作品,目的在于傳遞更多信息,并不代表本網贊同其觀點或證實其內容的真實性,不承擔此類作品侵權行為的直接責任及連帶責任。其他媒體、網站或個人從本網轉載時,必須保留本網注明的作品出處,并自負版權等法律責任。
如涉及作品內容、版權等問題,請在作品發(fā)表之日起一周內與本網聯系,否則視為放棄相關權利。




電路圖分類
廣告

熱門電路圖
最新電路圖


